你好,我是王磊,你也可以叫我Ivan。
今天这一讲是我们这门课的第二个答疑篇,我会带你回顾第9讲到第14讲的主要内容,集中解答留给你的思考题,同时回复一些留言区的热点问题。这几讲涉及的也是数据库的核心话题“事务”,咱们一定得学扎实了。
在第9讲,我们首先讨论了两种不同的原子性协议,分别是面向应用层的协议TCC和面向资源层的协议2PC。
使用TCC协议时,由应用系统负责协议的实现,数据库没有额外工作。所以,TCC更加灵活,但对业务的侵入性更高。反之,使用2PC协议时,主要靠数据库来实现,应用层工作很少,所以业务侵入少,但是存在同步阻塞、单点故障和数据不一致这三个问题。
针对2PC协议的这些问题,我又介绍了两种改进型协议。一种是Percolator模型,在TiDB和CockroachDB中有具体落地。另一种是GoldenDB中实现的“一阶段提交”协议。它们都较好地解决了单点故障和数据不一致的问题。而有关同步阻塞带来的高延迟问题,我们没有展开,而是留到了第10讲。
这一讲的是思考题是:2PC第一阶段“准备阶段”也被称为“投票阶段”,和Paxos协议处理阶段的命名相近,你觉得2PC和Paxos协议有没有关系,如果有又是什么关系呢?
“Chenchukun”“tt”“李鑫磊”“piboye”和“Bryant.C”等几位同学的留言都很好地回答了这个问题。总的来说,就是Paxos是对单值或者一种状态达成共识的过程,而2PC是对多个不同数据项的变更或者多个状态,达成一致的过程。它们是有区别的,Paxos不能替换2PC,但它们也是有某种联系的。那到底是什么联系呢?
别着急,我们先看看“Lost Horizon”和“平风造雨”两位同学的提问。
“Lost Horizon”在第9讲提出的问题是:如果向单元 A 发出 Confirm 操作成功且收到成功应答,向单元 B 发出 Confirm 操作成功,但没有收到成功应答,是否应该先确认 B 的状态,然后再决定是否需要回滚(或者补偿)A 的变更呢?
“平风造雨”在第10讲提出的问题是:如果客户端没有在一定的时间内得到所有意向写的反馈(不知道反馈是成功还是失败),要如何处理?
这两位同学的问题虽然不一样但有一个共同点,就是事务协调者收不到事务参与者的反馈怎么办。
为什么会收不到呢?多数情况是和网络故障有关。那么,Paxos协议这个针对网络分区而设计的共识算法,能不能帮助解决这个问题呢?
Paxos确实有帮助,但真正能解决问题的是在其之上衍生的Paxos Commit协议,这是一个融合了Paxos算法的原子提交协议,也是我们前面所说的2PC和Paxos的联系所在。
Paxos Commit协议是2006年在论文“Consensus on Transaction Commit”中首次提出的。值得一提的是,这篇论文的两位作者,正是我们课程中多次提到的Jim Gray和Leslie Lamport。他们分别是数据库和分布式领域的图灵奖获得者,也分别是2PC和Paxos的提出者。
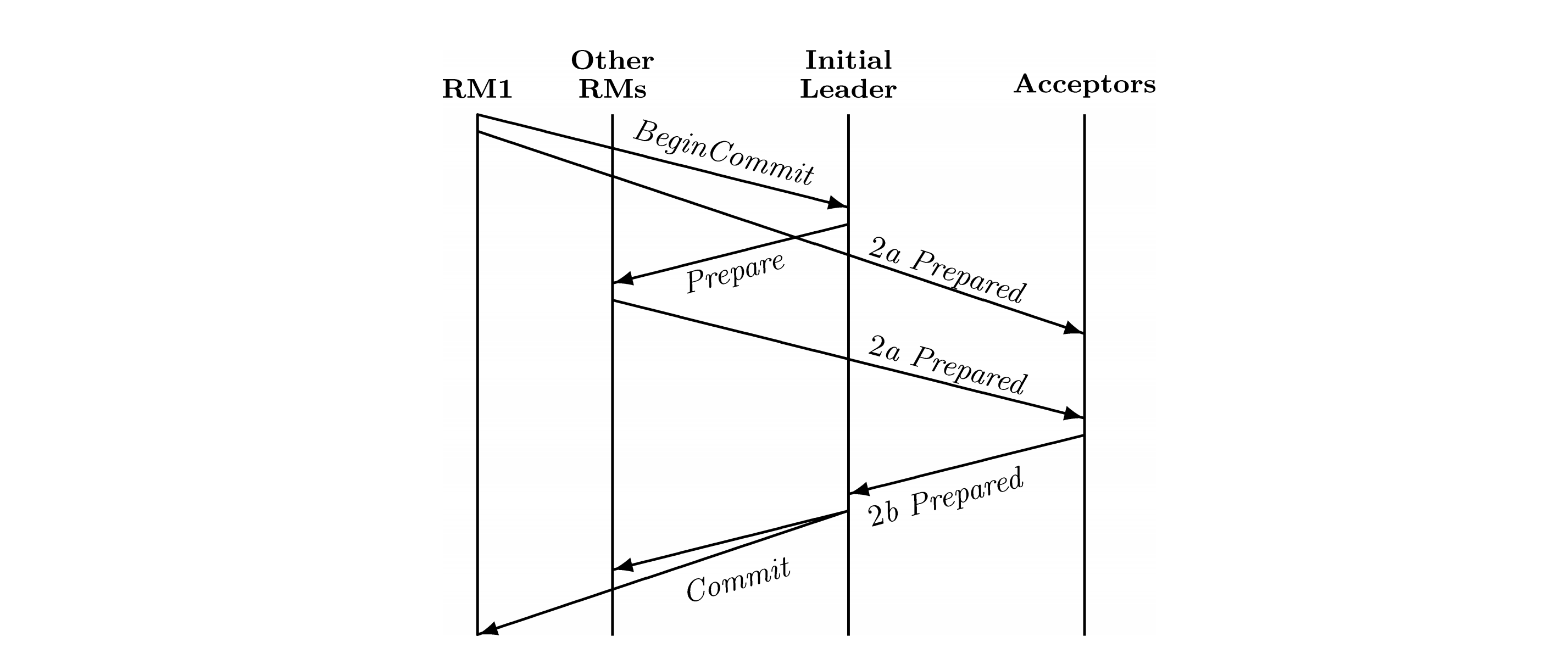
我们结合论文中的配图,简单学习一下Paxos Commit的思路。
Paxos Commit协议中有四个角色,有两个与2PC对应,分别是TM(Transaction Manager,事务管理者)也就是事务协调者,RM(Resource Manager,资源管理者)也就是事务参与者;另外两个角色与Paxos对应,一个是Leader,一个是Acceptor。其中,TM和Leader在逻辑上是不可能分的,所以在图中隐去了。因为Leader是选举出来的,所以第一个Leader标识为Initial Leader。
下面,我们来描述下这个处理过程。
这个过程中,如果Acceptor总数是2F+1,那么每个RM就有2F+1条路径与Leader通讯。只要保证其中F+1条路径是畅通的,整个协议就可以正常运行。因此,Paxos Commit协议的优势之一,就是在很大程度上避免了网络故障对系统的影响。但是,相比于2PC来说,它的消息数量大幅增加,而且多了一次消息延迟。目前,实际产品中还很少有使用Paxos Commit协议的。
第10讲的核心内容是2PC的低延迟技术,我们先是分析了延迟的主要构成,发现延迟时间与事务中的写入操作数量线性相关,然后又将延迟时间的计量单位统一为共识算法延迟$L_{c}$,最后得到了下面的延迟计算公式:
$$L_{txn} = (W + 1) * L_{c}$$
随后,我为你讲解了三种优化技术,都是基于Percolator模型的,分别是缓存提交写、管道和并行提交。TiDB采用“缓存提交写”达到了2倍共识算法延迟,但这个方案的缺点是缓存SQL的节点会出现瓶颈,而且不再是交互事务。CockroachDB采用了管道和并行提交技术,整体延迟缩短到了1倍共识算法延迟,可能是目前最极致的优化方法了。
这一讲的是思考题是:虽然CockroachDB的优化已经比较极致了,但还有些优化方法也很有趣,请你介绍下自己了解的2PC优化方法。
关于这个问题,我们刚刚讲的Paxos Commit其实已经是一种2PC的优化方法了。另外,在Spanner论文“Spanner: Google’s Globally-Distributed Database”中也介绍了它的2PC优化方式。Spanner的2PC优化特点在于由客户端负责第一段协调,发送prepare指令,减少了节点间的通讯。具体的内容,你可以参考下这篇论文。
在留言区,我看到很多同学对并行提交有不同的理解。我要再提示一下,并行提交中的异步写事务日志只是根据每个数据项的写入情况,追溯出事务的状态,然后落盘保存,整个过程并没有任何重试或者回滚的操作。这是因为,在之前的同步操作过程中,负责管道写入的同步线程,已经明确知道了每个数据项的写入情况,也就是确定了事务的状态,不同步落盘只是为了避免由此带来的共识算法延迟。
在第11讲中,我们介绍如何避免读写冲突的解决方案,其中很重要的概念就是MVCC和快照。MVCC是单体数据库普遍使用的一种技术,通过记录数据项历史版本的方式,提升系统应对多事务访问的并发处理能力。
在MVCC出现前读写操作是相互阻塞的,并行能力受到很大影响。而使用MVCC可以实现读写无阻塞,并能够达到RC(读已提交)隔离级别。基于MVCC还可以构建快照,使用快照则能够更容易地实现 RR(可重复读)和SI(快照隔离)两个隔离级别。
首先,我们学习了PGXC风格分布式数据库的读写冲突处理方案。PGXC因为使用单体数据库作为数据节点,所以沿用了MVCC来实现RC。但如果要实现RR级别,则需要全局事务管理器(GTM)承担产生事务ID和记录事务状态的职责。
然后,我们介绍了TiDB和CockroachDB这两种NewSQL风格分布式数据库的读写冲突处理方案。TiDB没有设置全局事务列表,所以读写是相互阻塞的。CockroachDB虽然有全局事务列表,但由于它的目标隔离级别是可串行化,所以也没有采用快照方式,读写也是相互阻塞的。
这一讲的思考题是:在介绍的几种读写冲突的处理方案中,时间都是非常重要的因素,但时间是有误差的,那么你觉得时间误差会影响读写冲突的处理吗?
其实,这个问题就是引导你思考,以便更好地理解第12讲的内容。MVCC机制是用时间戳作为重要依据来判别哪个数据版本是可读取的。但是,如果这个时间戳本身有误差,就需要特定的机制来管理这个误差,从而读取到正确的数据版本。更详细的内容,你可以去学习下第12讲。
“真名不叫黄金”同学的答案非常准确,抓住了时钟置信区间这个关键点,分析思路也很清晰,点赞。
在第12讲中,我们给出了时间误差的具体控制手段,也就是写等待和读等待。
Spanner采用了写等待方案,也就是Commit Wait,理论上每个写事务都要等待一个时间置信区间。对Spanner来说这个区间最大是7毫秒,均值是4毫秒。但是,由于Spanner的2PC设计,需要再增加一个时间置信区间,来确保提交时间戳晚于预备时间戳。所以,实际上Spanner的写等待时间就是两倍时间置信区间,均值达到了8毫秒。传说中,Spanner的TPS是125就是用这个均值计算的(1秒/8毫秒),但如果事务之间操作的数据不重叠,其实是不受这个限制的。
CockroachDB采用了读等待方式,就是在所有的读操作执行前处理时间置信区间。读等待的优点是偶发,只有读操作落入写操作的置信区间才需要重启,进行等待。但是,重启后的读操作可能继续落入其他写操作的置信区间,引发多次重启。所以,读等待的缺点是等待时间可能比较长。
这一讲的思考题是:读等待和写等待都是通过等待的方式,度过不确定的时间误差,从而给出确定性的读写顺序,但性能会明显下降。那么在什么情况下,不用“等待”也能达到线性一致性或因果一致性呢?”
我为这个问题准备了两个答案。
第一个答案是要复习第5讲的相关知识。如果分布式数据库使用了TSO,保证全局时钟的单向递增,那么就不再需要等待了,因为在事件发生时已经按照全序排列并进行了记录。
第二个答案是就时间的话题做下延展。“等待”是为了让事件先后关系明确,消除模糊的边界,但这个思路还是站在上帝视角。
我们试想一种场景,事件1是小明正在北京的饭馆里与人谈论小刚的大学趣事,事件2是小刚在温哥华的公寓里打了一个喷嚏。如果事件1发生后4毫秒,事件2才发生,那么从绝对时间,也就是全序上看,两者是有先后关系的。但是从因果关系上,也就是偏序上看,事件1与事件2是没有联系的。因为科学承认的最快速度是光速,从北京到温哥华,即使是光速也无法在4毫秒内到达。那么,从偏序关系上看,事件1和事件2是并发的,因为事件1没有机会影响到事件2。
当然,这个理论不是我看多了科幻电影想出来的,它来自Lamport的论文“ Time, Clocks, and the Ordering of Events in a Distributed System”。
所以,假设两个事件发生地的距离除以光速得到一个时间X,两个事件的时间戳间隔是Y,时钟误差是Z。如果X>Y+Z,那么可以确定两个事件是并行发生的,事件2就不用读等待了。这是因为既然事件是并行的,事件2看不到事件1的结果也就是正常的了。
在第13讲中,我们开始探讨“写写冲突”的控制技术,这也是并发控制最核心的内容。大型系统之所以能够承载海量并发,就在于底层数据库有强大的并发处理能力。
并发控制分为乐观协议和悲观协议两大类,单体数据库大多使用悲观协议。TiDB和CockroachDB都在早期版本中提供了乐观协议,但在后来的产品演进又改回了悲观协议,其主要原因是事务竞争激烈和对遗留应用系统的兼容。
我们还从经典理论教材中提取了并发控制的四阶段,忽略掉计算(C)阶段后,悲观协议与乐观协议的区别在于有效性验证(V)、读(R)、写(W)这三阶段的排序不同。在分布式架构下,有效性验证又分为局部有效性验证和全局有效性验证。因此,乐观又分为狭义乐观和广义乐观,而狭义乐观就是学术领域常说的OCC。TiDB的乐观锁,因为没有全局有效性验证,不严格符合VRW悲观协议排序,所以是广义乐观。而TiDB后来增加的悲观锁,增加了全局有效性验证,是严格的VRW,所以是悲观协议。
这一讲的思考题是:在了解乐观协议及TiDB乐观转悲观的设计后,请你来推测下CockroachDB向悲观协转换大概会采用什么方式?
这个问题是为了引出第14讲的主题。CockroachDB早期的乐观协议也是广义乐观,在局部看是悲观协议,使用了串行化图检测(SGT)的方式。SGT是区别于锁的另一种控制技术,具有更好的性能。CockroachDB的改良方式是增加了全局的锁表(Lock Table),局部保留了原有的SGT。
在第14讲中,我们首先讨论了完整的并发控制技术体系,选择了“Transactional Information Systems”定义狭义乐观和其他悲观协议这种的组织形式,而后对2PL的定义和各种变体进行了说明。我们根据S2PL的定义,可以推导出Percolator模型属于S2PL的结论。S2PL虽然使用广泛,但不能在生产级支持可串行化隔离。
PostgreSQL的SSI设计给出了另一种实现,它的理论基础是SGT。CockroachDB在此基础设计了读时间戳缓存(RTC),降低了原有SIREAD的开销,达到了生产级性能要求。最后,我还和你一起学习了CockroachDB采用全局锁表实现悲观协议的原理。
这一讲的思考题是:我们之前已经介绍过MVCC,它是一项重要的并发控制技术,你觉得该如何理解它和乐观协议、悲观协议的关系?
就像我们在第11讲中所说的,MVCC已经是数据库的底层技术,与乐观协议、悲观协议下的各项技术是两个不同的维度,最后形成了MVTO、MV2PL、MVSGT等技术。这些技术考虑了多版本情况下的处理,但遵循的基本原理还是一样的。
正如我在这一讲开头提到的,第9到第14这6讲的内容,都是围绕着分布式数据库的事务展开的,重点就是原子性和隔离性的协议、算法和工程实现。
对于原子性,我们主要关注非功能性指标背后的架构优化和理论创新,尤其是NewSQL风格分布式数据库在2PC的三个传统难题,也就是同步阻塞、单点故障、数据一致性上都取得的突破。
隔离性则不同,早在单体数据库时代,架构设计就在正确性,也就是隔离级别上作了妥协,换取性能。而分布式数据库在重新挑战了隔离性这个难题,CockroachDB在这方面的探索更是意义重大,它实践了一种兼顾正确性和性能的技术方案。
如果你对今天的内容有任何疑问,欢迎在评论区留言和我一起讨论。要是你身边的朋友也对分布式数据库的事务处理这个话题感兴趣,你也可以把今天这一讲分享给他,我们一起讨论。
James C. Corbett et al.: Spanner: Google’s Globally-Distributed Database
Jim Gray and Leslie Lamport: Consensus on Transaction Commit
Leslie Lamport: Time, Clocks, and the Ordering of Events in a Distributed System
Gerhard Weikum and Gottfried Vossen: Transactional Information Systems