你好,我是李兵。
我们知道JavaScript是一门动态语言,其执行效率要低于静态语言,V8为了提升JavaScript的执行速度,借鉴了很多静态语言的特性,比如实现了JIT机制,为了提升对象的属性访问速度而引入了隐藏类,为了加速运算而引入了内联缓存。
今天我们来重点分析下V8中的隐藏类,看看它是怎么提升访问对象属性值速度的。
由于隐藏类借鉴了部分静态语言的特性,因此要解释清楚这个问题,我们就先来分析下为什么静态语言比动态语言的执行效率更高。
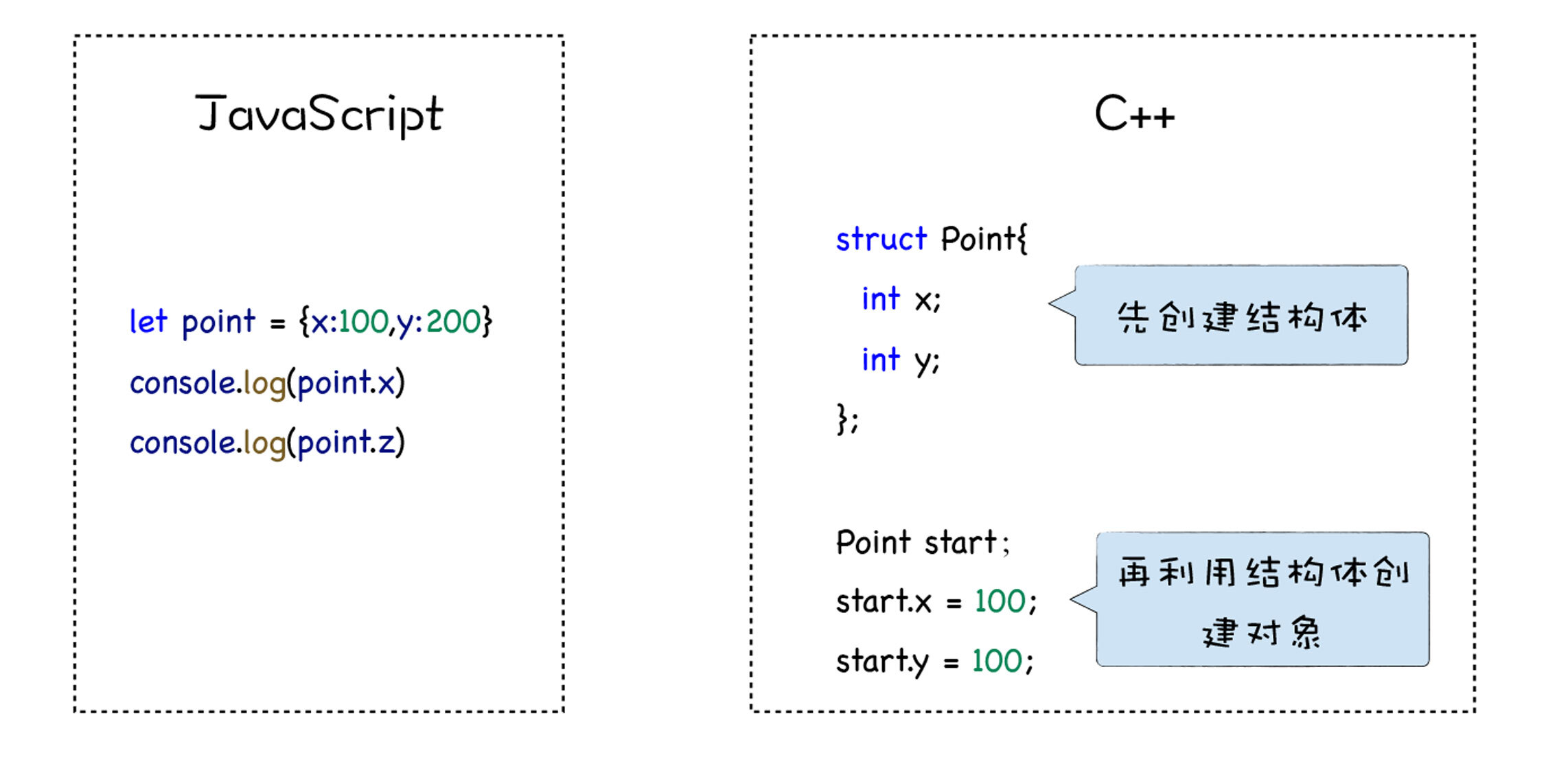
我们通过下面两段代码,来对比一下动态语言和静态语言在运行时的一些特征,一段是动态语言的JavaScript,另外一段静态语言的C++的源码,具体源码你可以参看下图:
那么在运行时,这两段代码的执行过程有什么区别呢?
我们知道,JavaScript在运行时,对象的属性是可以被修改的,所以当V8使用了一个对象时,比如使用了 start.x的时候,它并不知道该对象中是否有x,也不知道x相对于对象的偏移量是多少,也可以说V8并不知道该对象的具体的形状。
那么,当在JavaScript中要查询对象start中的x属性时,V8会按照具体的规则一步一步来查询,这个过程非常的慢且耗时(具体查找过程你可以参考《03|快属性和慢属性:V8是怎样提升对象属性访问速度的?》这节课程中的内容)。
这种动态查询对象属性的方式和C++这种静态语言不同,C++在声明一个对象之前需要定义该对象的结构,我们也可以称为形状,比如Point结构体就是一种形状,我们可以使用这个形状来定义具体的对象。
C++代码在执行之前需要先被编译,编译的时候,每个对象的形状都是固定的,也就是说,在代码的执行过程中,Point的形状是无法被改变的。
那么在C++中访问一个对象的属性时,自然就知道该属性相对于该对象地址的偏移值了,比如在C++中使用start.x的时候,编译器会直接将x相对于start的地址写进汇编指令中,那么当使用了对象start中的x属性时,CPU就可以直接去内存地址中取出该内容即可,没有任何中间的查找环节。
因为静态语言中,可以直接通过偏移量查询来查询对象的属性值,这也就是静态语言的执行效率高的一个原因。
既然静态语言的查询效率这么高,那么是否能将这种静态的特性引入到V8中呢?
答案是可行的。
目前所采用的一个思路就是将JavaScript中的对象静态化,也就是V8在运行JavaScript的过程中,会假设JavaScript中的对象是静态的,具体地讲,V8对每个对象做如下两点假设:
符合这两个假设之后,V8就可以对JavaScript中的对象做深度优化了,那么怎么优化呢?
具体地讲,V8会为每个对象创建一个隐藏类,对象的隐藏类中记录了该对象一些基础的布局信息,包括以下两点:
有了隐藏类之后,那么当V8访问某个对象中的某个属性时,就会先去隐藏类中查找该属性相对于它的对象的偏移量,有了偏移量和属性类型,V8就可以直接去内存中取出对于的属性值,而不需要经历一系列的查找过程,那么这就大大提升了V8查找对象的效率。
我们可以结合一段代码来分析下隐藏类是怎么工作的:
let point = {x:100,y:200}
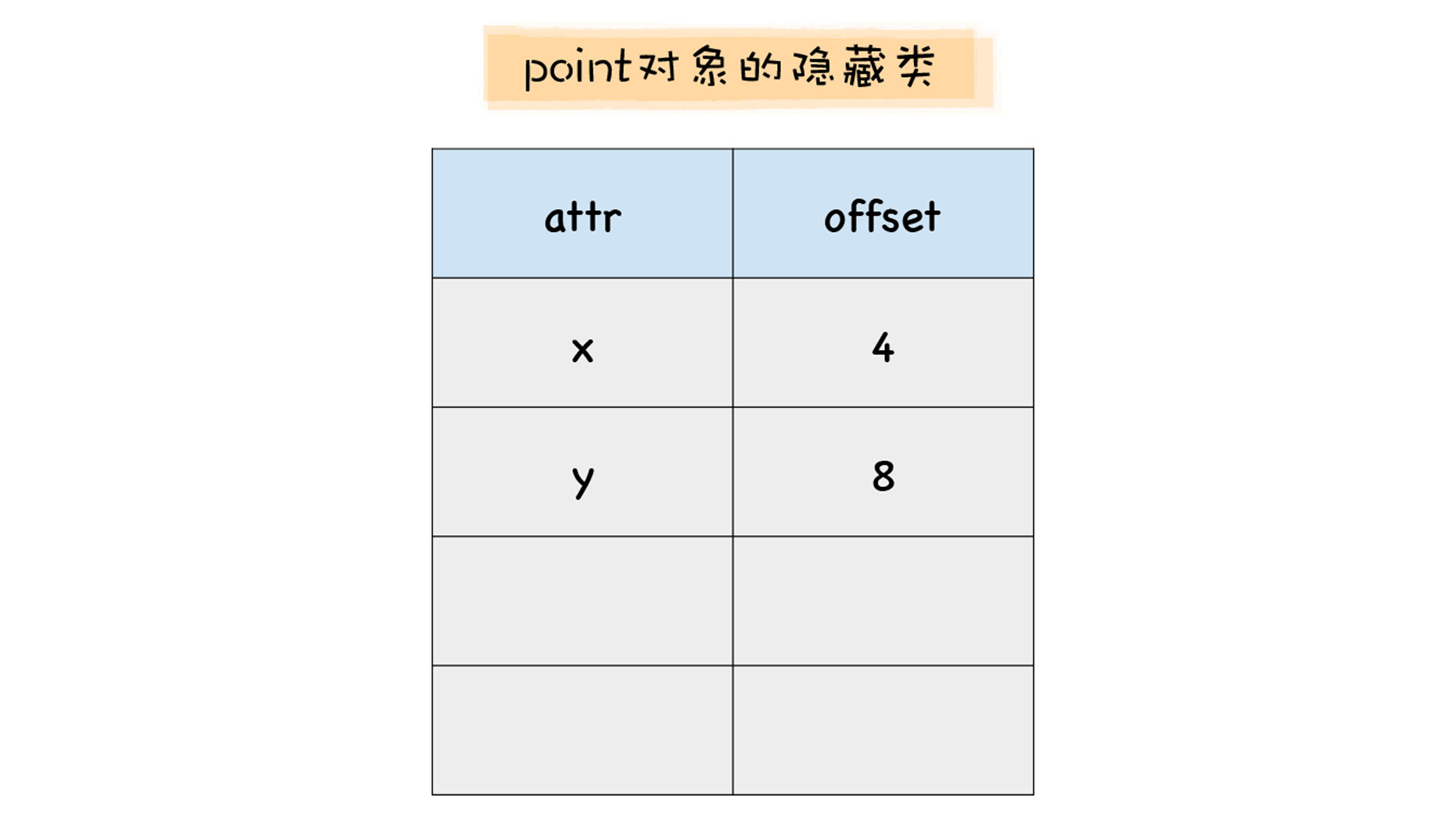
当V8执行到这段代码时,会先为point对象创建一个隐藏类,在V8中,把隐藏类又称为map,每个对象都有一个map属性,其值指向内存中的隐藏类。
隐藏类描述了对象的属性布局,它主要包括了属性名称和每个属性所对应的偏移量,比如point对象的隐藏类就包括了x和y属性,x的偏移量是4,y的偏移量是8。
注意,这是point对象的map,它不是point对象本身。关于point对象和map之间的关系,你可以参看下图:
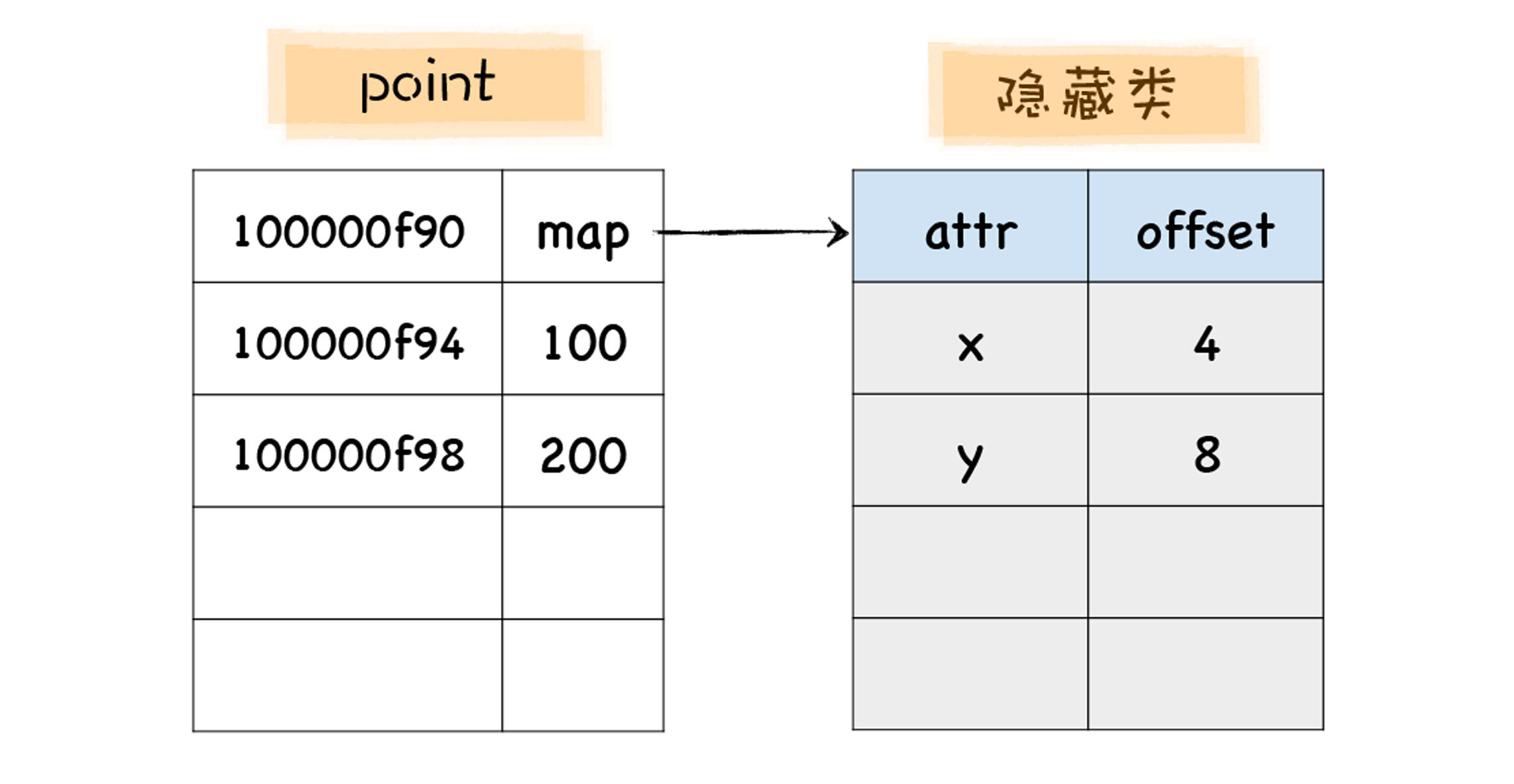
在这张图中,左边的是point对象在内存中的布局,右边是point对象的map,我们可以看到,point对象的第一个属性就指向了它的map,关于如何通过浏览器查看对象的map,我们在《03|快属性和慢属性:V8是怎样提升对象属性访问速度的?》这节课也做过简单的分析,你可以回顾下这节内容。
有了map之后,当你再次使用point.x访问x属性时,V8会查询point的map中x属性相对point对象的偏移量,然后将point对象的起始位置加上偏移量,就得到了x属性的值在内存中的位置,有了这个位置也就拿到了x的值,这样我们就省去了一个比较复杂的查找过程。
这就是将动态语言静态化的一个操作,V8通过引入隐藏类,模拟C++这种静态语言的机制,从而达到静态语言的执行效率。
了解了隐藏类的工作机制,我们可以使用d8提供的API DebugPrint来查看point对象中的隐藏类。
let point = {x:100,y:200};
%DebugPrint(point);
这里你需要注意,在使用d8内部API时,有一点很容易出错,就是需要为JavaScript代码加上分号,不然d8会报错,所以这段代码里面我都加上了分号。
然后将下面这段代码保存test.js文件中,再执行:
d8 --allow-natives-syntax test.js
执行这段命令,就可以打印出point对象的基础结构了,打印出来的结果如下所示:
DebugPrint: 0x19dc080c5af5: [JS_OBJECT_TYPE]
- map: 0x19dc08284d11 <Map(HOLEY_ELEMENTS)> [FastProperties]
- prototype: 0x19dc08241151 <Object map = 0x19dc082801c1>
- elements: 0x19dc080406e9 <FixedArray[0]> [HOLEY_ELEMENTS]
- properties: 0x19dc080406e9 <FixedArray[0]> {
#x: 100 (const data field 0)
#y: 200 (const data field 1)
}
0x19dc08284d11: [Map]
- type: JS_OBJECT_TYPE
- instance size: 20
- inobject properties: 2
- elements kind: HOLEY_ELEMENTS
- unused property fields: 0
- enum length: invalid
- stable_map
- back pointer: 0x19dc08284ce9 <Map(HOLEY_ELEMENTS)>
- prototype_validity cell: 0x19dc081c0451 <Cell value= 1>
- instance descriptors (own) #2: 0x19dc080c5b25 <DescriptorArray[2]>
- prototype: 0x19dc08241151 <Object map = 0x19dc082801c1>
- constructor: 0x19dc0824116d <JSFunction Object (sfi = 0x19dc081c55ad)>
- dependent code: 0x19dc080401ed <Other heap object (WEAK_FIXED_ARRAY_TYPE)>
- construction counter: 0
从这段point的内存结构中,我们可以看到,point对象的第一个属性就是map,它指向了0x19dc08284d11这个地址,这个地址就是V8为point对象创建的隐藏类,除了map属性之外,还有我们之前介绍过的prototype属性,elements属性和properties属性(关于这些属性的函数,你可以参看《03|快属性和慢属性:V8是怎样提升对象属性访问速度的?》和《05|原型链:V8是如何实现对象继承的?》这两节的内容)。
现在我们知道了在V8中,每个对象都有一个map属性,该属性值指向该对象的隐藏类。不过如果两个对象的形状是相同的,V8就会为其复用同一个隐藏类,这样有两个好处:
那么,什么情况下两个对象的形状是相同的,要满足以下两点:
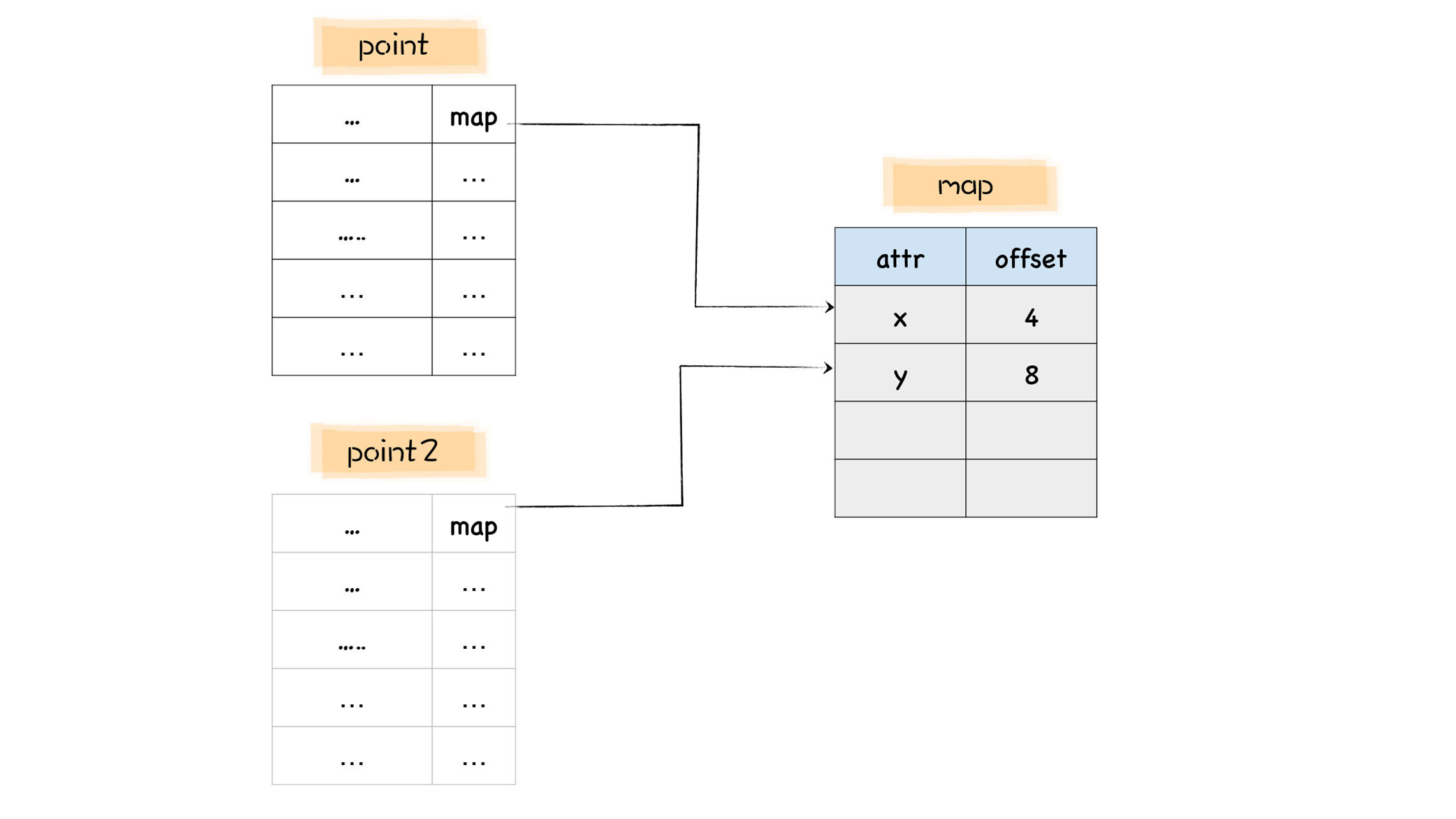
接下来我们就来创建两个形状一样的对象,然后看看它们的map属性是不是指向了同一个隐藏类,你可以参看下面的代码:
let point = {x:100,y:200};
let point2 = {x:3,y:4};
%DebugPrint(point);
%DebugPrint(point2);
当V8执行到这段代码时,首先会为point对象创建一个隐藏类,然后继续创建point2对象。在创建point2对象的过程中,发现它的形状和point是一样的。这时候,V8就会将point的隐藏类给point2复用,具体效果你可以参看下图:
你也可以使用d8来证实下,同样使用这个命令:
d8 --allow-natives-syntax test.js
打印出来的point和point2对象,你会发现它们的map属性都指向了同一个地址,这也就意味着它们共用了同一个map。
关于隐藏类,还有一个问题你需要注意一下。在这节课开头我们提到了,V8为了实现隐藏类,需要两个假设条件:
但是,JavaScript依然是动态语言,在执行过程中,对象的形状是可以被改变的,如果某个对象的形状改变了,隐藏类也会随着改变,这意味着V8要为新改变的对象重新构建新的隐藏类,这对于V8的执行效率来说,是一笔大的开销。
通俗地理解,给一个对象添加新的属性,删除新的属性,或者改变某个属性的数据类型都会改变这个对象的形状,那么势必也就会触发V8为改变形状后的对象重建新的隐藏类。
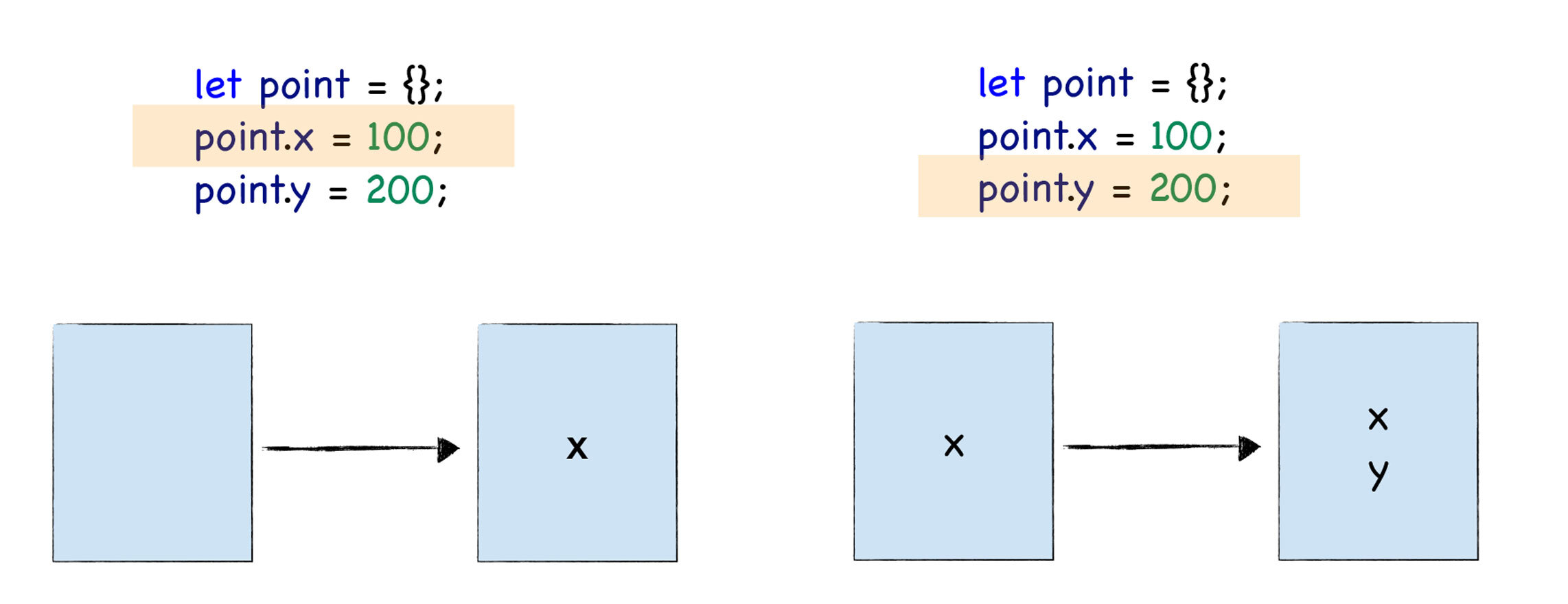
我们可以看一个简单的例子:
let point = {};
%DebugPrint(point);
point.x = 100;
%DebugPrint(point);
point.y = 200;
%DebugPrint(point);
将这段代码保存到test.js文件中,然后执行:
d8 --allow-natives-syntax test.js
执行这段命令,d8会打印出来不同阶段的point对象所指向的隐藏类,在这里我们只关心point对象map的指向,所以我将其他的一些信息都省略了,最终打印出来的结果如下所示:
DebugPrint: 0x986080c5b35: [JS_OBJECT_TYPE]
- map: 0x0986082802d9 <Map(HOLEY_ELEMENTS)> [FastProperties]
- ...
DebugPrint: 0x986080c5b35: [JS_OBJECT_TYPE]
- map: 0x098608284ce9 <Map(HOLEY_ELEMENTS)> [FastProperties]
- ...
- properties: 0x0986080406e9 <FixedArray[0]> {
#x: 100 (const data field 0)
}
DebugPrint: 0x986080c5b35: [JS_OBJECT_TYPE]
- map: 0x098608284d11 <Map(HOLEY_ELEMENTS)> [FastProperties]
- p
- ...
- properties: 0x0986080406e9 <FixedArray[0]> {
#x: 100 (const data field 0)
#y: 200 (const data field 1)
根据这个打印出来的结果,我们可以明显看到,每次给对象添加了一个新属性之后,该对象的隐藏类的地址都会改变,这也就意味着隐藏类也随着改变了,改变过程你可以参看下图:
同样,如果你删除了对象的某个属性,那么对象的形状也就随着发生了改变,这时V8也会重建该对象的隐藏类,我们可以看下面这样的一个例子:
let point = {x:100,y:200};
delete point.x
我们再次使用d8来打印这段代码中不同阶段的point对象属性,移除多余的信息,最终打印出来的结果如下所示
DebugPrint: 0x1c2f080c5b1d: [JS_OBJECT_TYPE]
- map: 0x1c2f08284d11 <Map(HOLEY_ELEMENTS)> [FastProperties]
-...
- properties: 0x1c2f080406e9 <FixedArray[0]> {
#x: 100 (const data field 0)
#y: 200 (const data field 1)
}
DebugPrint: 0x1c2f080c5b1d: [JS_OBJECT_TYPE]
- map: 0x1c2f08284d11 <Map(HOLEY_ELEMENTS)> [FastProperties]
- ...
- properties: 0x1c2f08045567 <FixedArray[0]> {
#y: 200 (const data field 1)
}
好了,现在我们知道了V8会为每个对象分配一个隐藏类,在执行过程中:
我们当然希望对象中的隐藏类不要随便被改变,因为这样会触发V8重构该对象的隐藏类,直接影响到了程序的执行性能。那么在实际工作中,我们应该尽量注意以下几点:
一,使用字面量初始化对象时,要保证属性的顺序是一致的。比如先通过字面量x、y的顺序创建了一个point对象,然后通过字面量y、x的顺序创建一个对象point2,代码如下所示:
let point = {x:100,y:200};
let point2 = {y:100,x:200};
虽然创建时的对象属性一样,但是它们初始化的顺序不一样,这也会导致形状不同,所以它们会有不同的隐藏类,所以我们要尽量避免这种情况。
二,尽量使用字面量一次性初始化完整对象属性。因为每次为对象添加一个属性时,V8都会为该对象重新设置隐藏类。
三,尽量避免使用delete方法。delete方法会破坏对象的形状,同样会导致V8为该对象重新生成新的隐藏类。
这节课我们介绍了V8中隐藏类的工作机制,我们先分析了V8引入隐藏类的动机。因为JavaScript是一门动态语言,对象属性在执行过程中是可以被修改的,这就导致了在运行时,V8无法知道对象的完整形状,那么当查找对象中的属性时,V8就需要经过一系列复杂的步骤才能获取到对象属性。
为了加速查找对象属性的速度,V8在背后为每个对象提供了一个隐藏类,隐藏类描述了该对象的具体形状。有了隐藏类,V8就可以根据隐藏类中描述的偏移地址获取对应的属性值,这样就省去了复杂的查找流程。
不过隐藏类是建立在两个假设基础之上的:
一旦对象的形状发生了改变,这意味着V8需要为对象重建新的隐藏类,这就会带来效率问题。为了避免一些不必要的性能问题,我们在程序中尽量不要随意改变对象的形状。我在这节课中也给你列举了几个最佳实践的策略。
最后,关于隐藏类,我们记住以下几点。
现在我们知道了V8为每个对象配置了一个隐藏类,隐藏类描述了该对象的形状,V8可以通过隐藏类快速获取对象的属性值。不过这里还有另外一类问题需要考虑。
比如我定义了一个获取对象属性值的函数loadX,loadX有一个参数,然后返回该参数的x属性值:
function loadX(o) {
return o.x
}
var o = { x: 1,y:3}
var o1 = { x: 3 ,y:6}
for (var i = 0; i < 90000; i++) {
loadX(o)
loadX(o1)
}
当V8调用loadX的时候,会先查找参数o的隐藏类,然后利用隐藏类中的x属性的偏移量查找到x的属性值,虽然利用隐藏类能够快速提升对象属性的查找速度,但是依然有一个查找隐藏类和查找隐藏类中的偏移量两个操作,如果loadX在代码中会被重复执行,依然影响到了属性的查找效率。
那么留给你的问题是:如果你是V8的设计者,你会采用什么措施来提高loadX函数的执行效率?欢迎你在留言区与我分享讨论。
感谢你的阅读,如果你觉得这一讲的内容对你有所启发,也欢迎把它分享给你的朋友。
评论