你好,我是徐文浩。从今天开始,我们就正式地来一起解读和学习大数据领域中,一些经典的论文。这节课,我们就从“The Google File System”这篇论文开始。
这篇论文发表在2003年,现在来看,它算是一篇“老”论文了。然而在我第一次看到这篇论文的时候,它可代表着强大而神秘的黑科技。
在这篇论文发表之前,工业界的分布式系统最多也就是几十台服务器的MPI集群。而这篇GFS的论文一发表,一下子就拿出了一个运作在1000台服务器以上的分布式文件系统。并且这个文件系统,还会面临外部数百个并发访问的客户端,可以称得上是石破天惊。
当然,在18年后的今天,开源社区里的各种分布式系统,也都远比当初的GFS更加复杂、强大。回顾这篇18年前的论文,GFS可以说是“技术上辉煌而工程上保守”。说GFS技术上辉煌,是因为Google通过廉价的PC级别的硬件,搭建出了可以处理整个互联网网页数据的系统。而说GFS工程上保守,则是因为GFS没有“发明”什么特别的黑科技,而是在工程上做了大量的取舍(trade-off)。
在我看来,GFS定了三个非常重要的设计原则,这三个原则带来了很多和传统的分布式系统研究大相径庭的设计决策。但是这三个原则又带来了大量工程上的实用性,使得GFS的设计思路后续被Hadoop这样的系统快速借鉴并予以实现。
那这三个原则是什么呢?接下来我就给你介绍介绍。
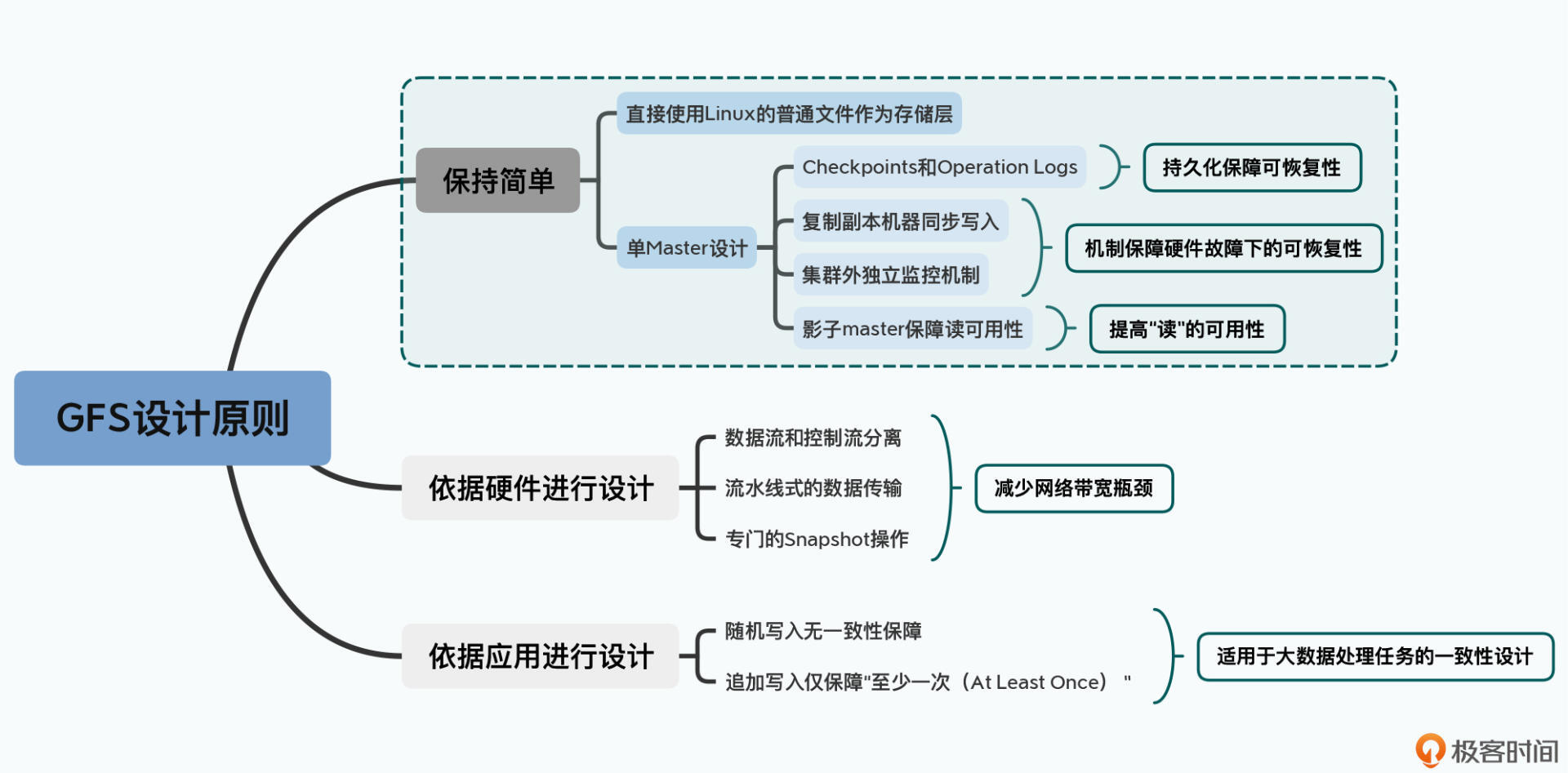
第一个是以工程上“简单”作为设计原则。
GFS直接使用了Linux服务上的普通文件作为基础存储层,并且选择了最简单的单Master设计。单Master让GFS的架构变得非常简单,避免了需要管理复杂的一致性问题。不过它也带来了很多限制,比如一旦Master出现故障,整个集群就无法写入数据,而恢复Master则需要运维人员手动操作,所以GFS其实算不上一个高可用的系统。
但另外一方面,GFS还是采用了Checkpoints、操作日志(Operation Logs)、影子Master(Shadow Master)等一系列的工程手段,来尽可能地保障整个系统的“可恢复(Recoverable)”,以及读层面的“可用性(Availability)”。
可以说,GFS是恪守“简单”这个原则而设计了第一版本的系统,并且在不破坏这个设计原则的情况下,通过上面一系列独立可插拔的工程策略,来进一步提高系统的可用性。
第二个是根据硬件特性来进行设计取舍。
2003年,大家都还在用机械硬盘,随机读写的性能很差,所以在GFS的设计中,重视的是顺序读写的性能,对随机写入的一致性甚至没有任何保障。
而你要知道,2003年的数据中心,各台机器的网卡带宽只有100MB,网络带宽常常是系统瓶颈。所以GFS在写数据的时候,选择了流水线式的数据传输,而没有选择树形的数据传输方式。更进一步地,GFS专门设计了一个Snapshot的文件复制操作,在文件复制的时候避免了数据在网络上传输。这些设计都是为了减少数据在网络上的传输,避免我们有限的网络带宽成为瓶颈。
第三个是根据实际应用的特性,放宽了数据一致性(consistency)的选择。
最后,论文里也提到,GFS是为了在廉价硬件上进行大规模数据处理而设计的。所以GFS的一致性相当宽松。GFS本身对于随机写入的一致性没有任何保障,而是把这个任务交给了客户端。对于追加写入(Append),GFS也只是作出了“至少一次(At Least Once)”这样宽松的保障。
可以说,GFS是一个基本没有什么一致性保障的文件系统。但即使是这样,通过在客户端库里面加上校验、去重这样的处理机制,GFS在大规模数据处理上已经算是足够好用了。
OK,那到这里,你应该就大致理解了GFS的设计决策。不过你也要清楚的是,这三个设计原则可远远没有以上我介绍的这么简单。所以接下来,我会通过三节课的时间,来带你分别剖析这三个重要的设计选择。
那么今天这节课,我们就先一起来看看第一个选择,也就是“简单”这个设计原则。
在这个设计原则下,我们会看到GFS是一个非常简单的单Master架构,但是这个Master其实有三种不同的身份,分别是:
并且,这三种身份是依靠不同的独立模块完成的,互相之间并不干扰。所以,学完这一讲,你对常见的主从架构(Master-Slave)下的Master的职责,以及数据复制的模式也会有一个清晰的认识。
作为一个分布式文件系统,一个有几千台服务器跑在线上的真实系统,GFS的设计可以说是非常简单。
我给你举个例子。要把一个文件存在GFS上,其实和在Linux操作系统上很像,GFS一样会通过“命名空间+文件名”来定义一个文件。比如,我们可以把这一讲的录音文件存储在/data/geektime/bigdata/gfs01这样一个路径下。这样,所有GFS的客户端,都可以通过这个/data/geektime/bigdata命名空间加上gfs01这个文件名,去读或者写这个文件。
那么,当我们的客户端,实际上要去读或者写这个gfs01文件的时候,这个文件是实际存放在哪个物理服务器上呢?以及我们的客户端,具体是怎么读到这个文件的呢?
首先你要知道,在整个GFS中,有两种服务器,一种是master,也就是整个GFS中有且仅有一个的主控节点;第二种是chunkserver,也就是实际存储数据的节点。
而既然GFS是叫做分布式文件系统,那么这个文件,其实就可以不存储在同一个服务器上。
因此,在GFS里面,会把每一个文件按照64MB一块的大小,切分成一个个chunk。每个chunk都会有一个在GFS上的唯一的handle,这个handle其实就是一个编号,能够唯一标识出具体的chunk。然后每一个chunk,都会以一个文件的形式,放在chunkserver上。
而chunkserver,其实就是一台普通的Linux服务器,上面跑了一个用户态的GFS的chunkserver程序。这个程序,会负责和master以及GFS的客户端进行RPC通信,完成实际的数据读写操作。
当然,为了确保数据不会因为某一个chunkserver坏了就丢失了,每个chunk都会存上整整三份副本(replica)。其中一份是主数据(primary),两份是副数据(secondary),当三份数据出现不一致的时候,就以主数据为准。有了三个副本,不仅可以防止因为各种原因丢数据,还可以在有很多并发读取的时候,分摊系统读取的压力。

如此一来,文件就被拆分成了一个个的chunk存在了chunkserver上。那么你可能还要问:GFS的客户端,怎么知道该去哪个chunkserver找自己要的文件呢?
答案当然是问master啦。
首先,master里面会存放三种主要的元数据(metadata):
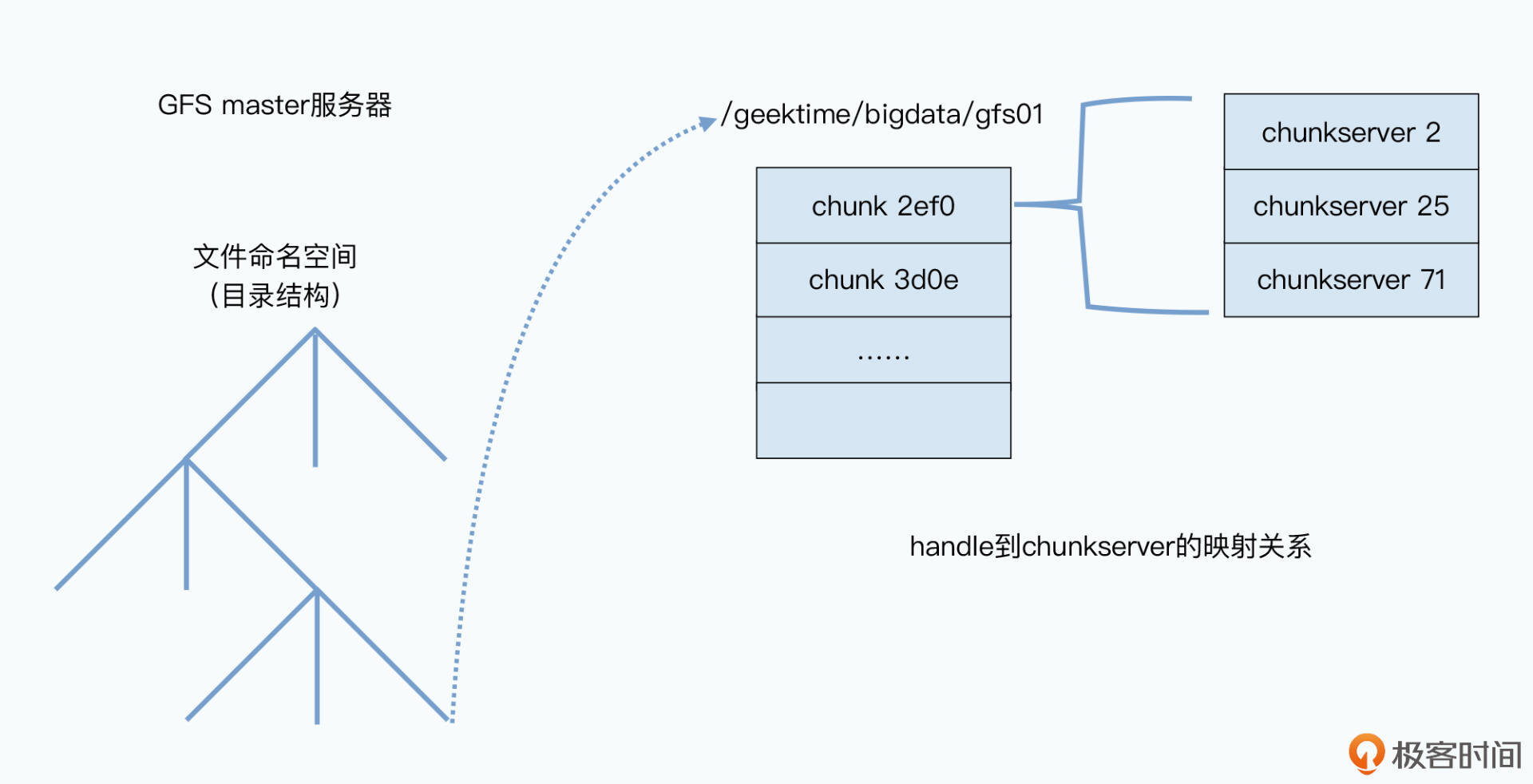
然后,当我们要通过一个客户端去读取GFS里面的数据的时候,需要怎么做呢?GFS会有以下三个步骤:
你可以参考下图所展示的客户端读取数据的整个过程指令流向。

这整个过程抽象一下,其实和Linux文件系统差不多。master节点和chunkserver这样两种节点的设计,其实和操作系统中的文件系统一脉相承。master就好像存储了所有inode信息的super block,而chunk就是文件系统中的一个个block。只不过chunk比block的尺寸大了一些,并且放在了很多台不同的机器上而已。我们通过master找到chunk的位置来读取数据,就好像操作系统里通过inode到block的位置,再从block里面读取数据。
所以,这个时候的master,其实就是一个“目录服务”,master本身不存储数据,而是只是存储目录这样的元数据。这个和我们的单机系统的设计思想是一样的。其实在计算机这个行业中,所有的系统都是从最简单、最底层的系统演化而来的。而这个课程中你看到的大部分的设计,其实都有这个特质。
不过,简单不是没有代价的。
在这个设计下,你会发现GFS里面的master节点压力很大。在一个1000台服务器的集群里面,chunkserver有上千个,但master只有一个。几百个客户端并发读取的数据,虽然可以分摊到那1000个chunkserver的节点上,但是找到要读的文件的数据存放在哪里,都要去master节点里面去找。
所以,master节点的所有数据,都是保存在内存里的。这样,master的性能才能跟得上几百个客户端的并发访问。
但是数据放在内存里带来的问题,就是一旦master挂掉,数据就会都丢了。所以,master会通过记录操作日志和定期生成对应的Checkpoints进行持久化,也就是写到硬盘上。
这是为了确保在master里的这些数据,不会因为一次机器故障就丢失掉。当master节点重启的时候,就会先读取最新的Checkpoints,然后重放(replay)Checkpoints之后的操作日志,把master节点的状态恢复到之前最新的状态。这是最常见的存储系统会用到的可恢复机制。
当然,光有这些还不够,如果只是master节点重新启动一下,从Checkpoints和日志中恢复到最新状态自然是很快的。可要是master节点的硬件彻底故障了呢?
你要知道,去数据中心重新更换硬件可不是几分钟的事情,所以GFS还为master准备好了几个“备胎”,也就是另外几台Backup Master。所有针对master的数据操作,都需要同样写到另外准备的这几台服务器上。只有当数据在master上操作成功,对应的操作记录刷新到硬盘上,并且这几个Backup Master的数据也写入成功,并把操作记录刷新到硬盘上,整个操作才会被视为操作成功。
这种方式,叫做数据的“同步复制”,是分布式数据系统里的一种典型模式。假如你需要一个高可用的MySQL集群,一样也可以采用同步复制的方式,在主从服务器之间同步数据。

而在同步复制这个机制之外,在集群外部还有监控master的服务在运行。如果只是master的进程挂掉了,那么这个监控程序会立刻重启master进程。而如果master所在的硬件或者硬盘出现损坏,那么这个监控程序就会在前面说的Backup Master里面找一个出来,启动对应的master进程,让它“备胎转正”,变成新的master。
而这个里面的数据,和原来的master其实一模一样。
不过,为了让集群中的其他chunkserver以及客户端不用感知这个变化,GFS通过一个规范名称(Canonical Name)来指定master,而不是通过IP地址或者Mac地址。这样,一旦要切换master,这个监控程序只需要修改DNS的别名,就能达到目的。有了这个机制,GFS的master就从之前的可恢复(Recoverable),进化成了能够快速恢复(Fast Recovery)。
不过,就算做到了快速恢复,我们还是不满足。毕竟,从监控程序发现master节点故障、启动备份节点上的master进程、读取Checkpoints和操作日志,仍然是一个几秒级别乃至分钟级别的过程。在这个时间段里,我们可能仍然有几百个客户端程序“嗷嗷待哺”,希望能够在GFS上读写数据。虽然作为单个master的设计,这个时候的确是没有办法去写入数据的。
但是Google的工程师还是想了一个办法,让我们这个时候还能够从GFS上读取数据。
这个办法就是加入一系列只读的“影子Master”,这些影子Master和前面的备胎不同,master写入数据并不需要等到影子Master也写入完成才返回成功。而是影子Master不断同步master输入的写入,尽可能保持追上master的最新状态。
这种方式,叫做数据的“异步复制”,是分布式系统里另一种典型模式。异步复制下,影子Master并不是和master的数据完全同步的,而是可能会有一些小小的延时。
影子Master会不断同步master里的数据,不过当master出现问题的时候,客户端们就可以从这些影子Master里找到自己想要的信息。当然,因为小小的延时,客户端有很小的概率,会读到一些过时的master里面的信息,比如命名空间、文件名等这些元数据。但你也要知道,这种情况其实只会发生在以下三个条件都满足的情况下:
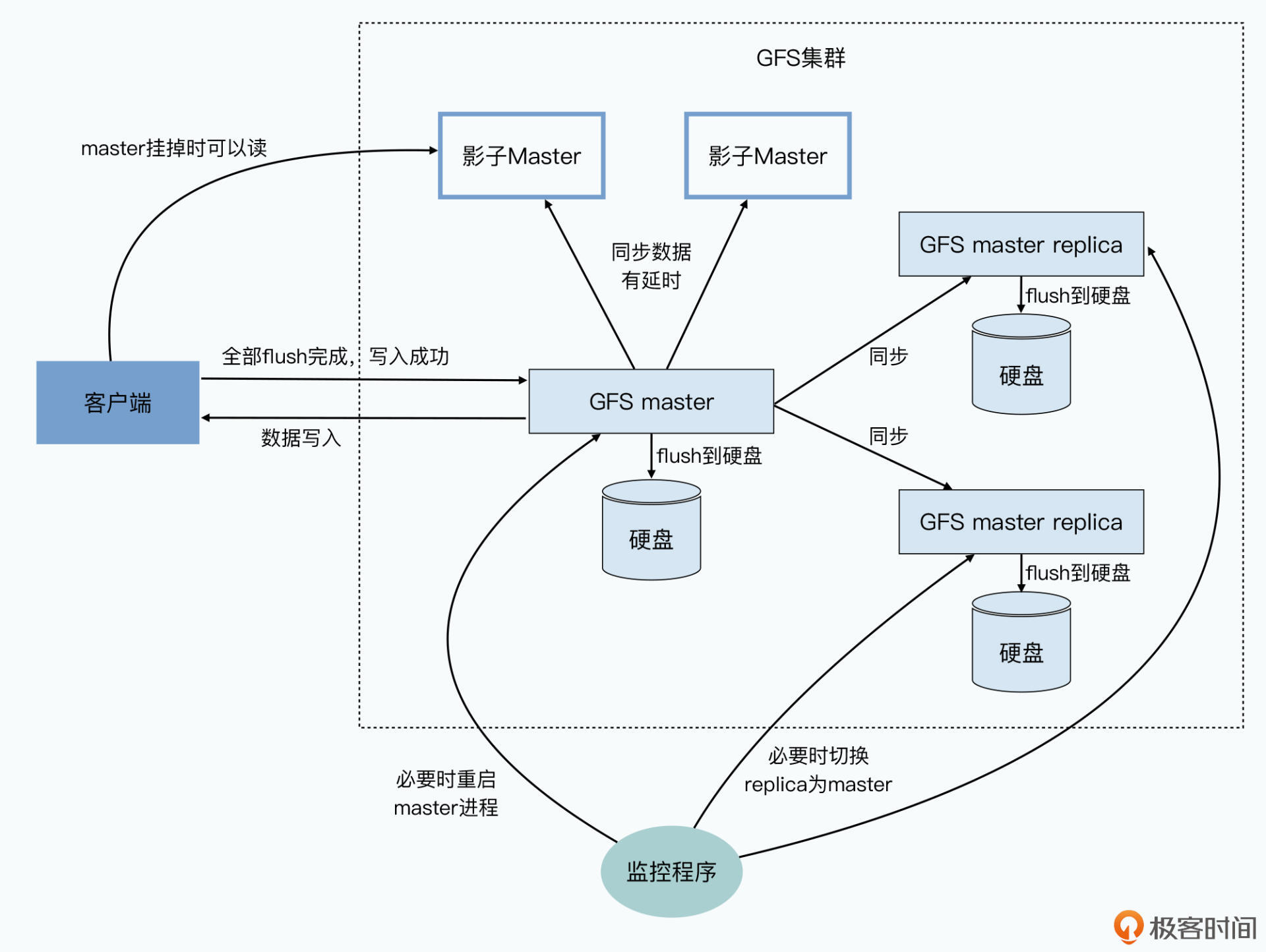
相比于这个小小的可能性,影子Master让整个GFS在master快速恢复的过程中,虽然不能写数据,但仍然是完全可读的。至少在集群的读取操作上,GFS可以算得上是“高可用(High Availability)”的了。
好了,相信到这里,你应该就对GFS的基本架构有一定的了解了。GFS并不是一篇有着大量新的研究发现的理论性的论文。恰恰相反,整个GFS的架构,是通过非常重要的工程原则来设计的,也就是尽量简单、需要考虑实际的硬件情况,以及针对实际的应用场景进行设计。
今天,我们重点围绕GFS的“简单性”,了解了GFS的基础架构设计。GFS采用了单Master架构,但是这个Master有着三重不同的含义。
首先,作为和chunkserver相对的master,它是一个目录服务。所有的元数据都会保留在我们的master里,而所有的数据会保存在chunkserver里。master存的就好比是inode信息,而chunkserver存的则是实际的block。
其次,为了保障系统在故障下的快速恢复能力和读数据的高可用性,GFS又对这个master添加了各种工程保障措施。这些措施,包括Checkpoints和操作日志、Backup Master、外部的监控程序,以及只读的影子 Master。在这个高可用场景下,Master是唯一可以写入数据的节点。Backup Master通过同步复制的方式从master同步数据,而影子Master则通过异步复制的方式来同步master的数据。
在这个场景下,Backup Master和影子Master其实是Master的Slave节点。如果我们把Master当成是一个MySQL数据库的主节点,那么Backup Master就是配置了高可用的同步复制的HA节点,而影子Master就是只配置了异步复制分担数据读取压力的readonly节点。
我希望你在学完这篇论文之后,也能够学以致用,当你日后在做系统设计的时候,就从“简单”开始,让系统更容易维护和迭代。同样的,你也一定会面临,你的master需要承担哪些职责、采用哪些数据复制方式的问题。
下节课,我会带你来看看GFS另外一个非常重要的设计原则,那就是根据实际硬件情况进行系统设计。你会发现,软件系统的设计,不是抽象的画画图纸,而是和我们设计汽车、飞机一样,需要考虑真实的物理硬件的性能和限制的。甚至有些设计,就是专门针对硬件的物理特性的。
最后,专栏是你学习的起点,我非常推荐你去读一读GFS论文的原文。如果你觉得自己英文不够好,作为2003年的一篇“老”论文,网上也有大量的中文解读笔记,你都可以去翻一翻,我把论文的链接放在了这里。当然,还有一个选择,就是去读一读借鉴了GFS的Hadoop上的HDFS的论文,我也把链接放在了这里。
除此之外,MIT的开放课程,分布式系统里的第三讲,就是针对GFS的专门讲解,你也可以去看一看他们的视频,网上也能找到有中文字幕的版本。
在课程的最后,我来给你留两道思考题,你可以思考一下:
你可以把你的答案留在评论区,和大家一起探讨、交流,看看自己的理解是不是正确。