我在专栏上一期里提到了5种I/O模型,相应的,Java提供了BIO、NIO和NIO.2这些API来实现这些I/O模型。BIO是我们最熟悉的同步阻塞,NIO是同步非阻塞,那NIO.2又是什么呢?NIO已经足够好了,为什么还要NIO.2呢?
NIO和NIO.2最大的区别是,一个是同步一个是异步。我在上期提到过,异步最大的特点是,应用程序不需要自己去触发数据从内核空间到用户空间的拷贝。
为什么是应用程序去“触发”数据的拷贝,而不是直接从内核拷贝数据呢?这是因为应用程序是不能访问内核空间的,因此数据拷贝肯定是由内核来做,关键是谁来触发这个动作。
是内核主动将数据拷贝到用户空间并通知应用程序。还是等待应用程序通过Selector来查询,当数据就绪后,应用程序再发起一个read调用,这时内核再把数据从内核空间拷贝到用户空间。
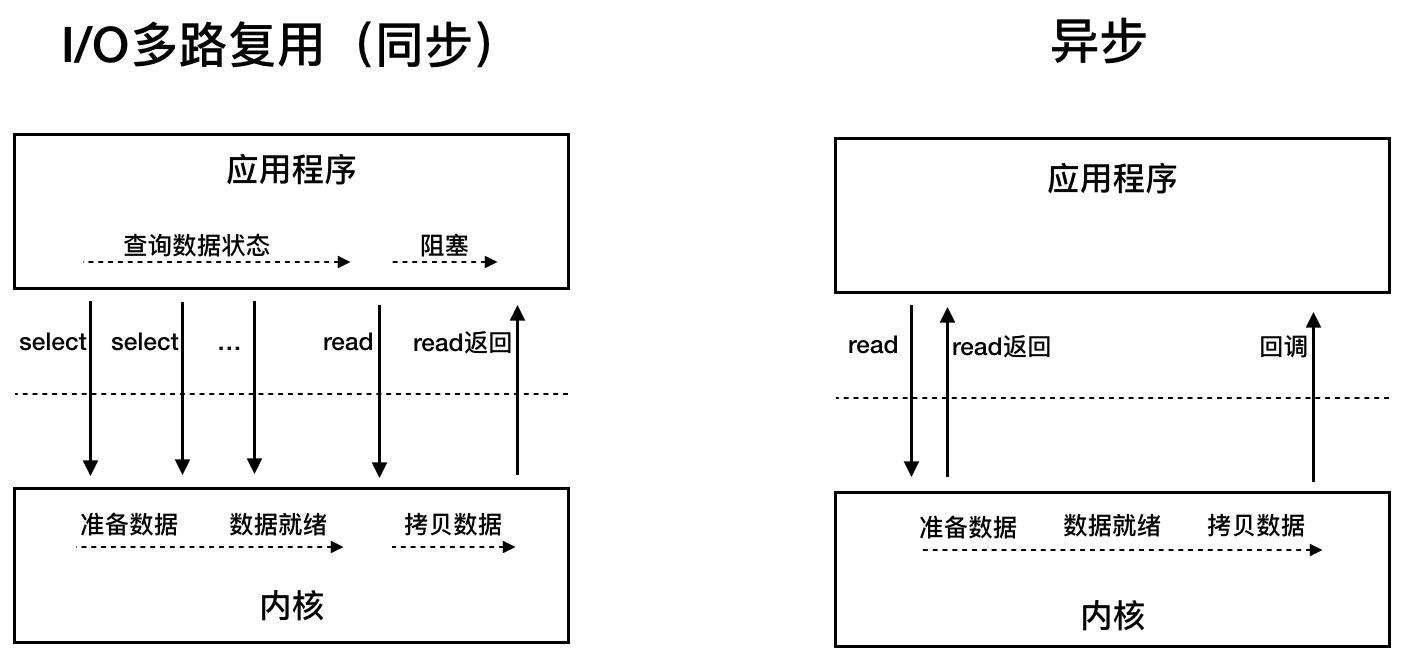
需要注意的是,数据从内核空间拷贝到用户空间这段时间,应用程序还是阻塞的。所以你会看到异步的效率是高于同步的,因为异步模式下应用程序始终不会被阻塞。下面我以网络数据读取为例,来说明异步模式的工作过程。
首先,应用程序在调用read API的同时告诉内核两件事情:数据准备好了以后拷贝到哪个Buffer,以及调用哪个回调函数去处理这些数据。
之后,内核接到这个read指令后,等待网卡数据到达,数据到了后,产生硬件中断,内核在中断程序里把数据从网卡拷贝到内核空间,接着做TCP/IP协议层面的数据解包和重组,再把数据拷贝到应用程序指定的Buffer,最后调用应用程序指定的回调函数。
你可能通过下面这张图来回顾一下同步与异步的区别:
我们可以看到在异步模式下,应用程序当了“甩手掌柜”,内核则忙前忙后,但最大限度提高了I/O通信的效率。Windows的IOCP和Linux内核2.6的AIO都提供了异步I/O的支持,Java的NIO.2 API就是对操作系统异步I/O API的封装。
今天我们会重点关注Tomcat是如何实现异步I/O模型的,但在这之前,我们先来简单回顾下如何用Java的NIO.2 API来编写一个服务端程序。
public class Nio2Server {
void listen(){
//1.创建一个线程池
ExecutorService es = Executors.newCachedThreadPool();
//2.创建异步通道群组
AsynchronousChannelGroup tg = AsynchronousChannelGroup.withCachedThreadPool(es, 1);
//3.创建服务端异步通道
AsynchronousServerSocketChannel assc = AsynchronousServerSocketChannel.open(tg);
//4.绑定监听端口
assc.bind(new InetSocketAddress(8080));
//5. 监听连接,传入回调类处理连接请求
assc.accept(this, new AcceptHandler());
}
}
上面的代码主要做了5件事情:
你可能会问,为什么需要创建一个线程池呢?其实在异步I/O模型里,应用程序不知道数据在什么时候到达,因此向内核注册回调函数,当数据到达时,内核就会调用这个回调函数。同时为了提高处理速度,会提供一个线程池给内核使用,这样不会耽误内核线程的工作,内核只需要把工作交给线程池就立即返回了。
我们再来看看处理连接的回调类AcceptHandler是什么样的。
//AcceptHandler类实现了CompletionHandler接口的completed方法。它还有两个模板参数,第一个是异步通道,第二个就是Nio2Server本身
public class AcceptHandler implements CompletionHandler<AsynchronousSocketChannel, Nio2Server> {
//具体处理连接请求的就是completed方法,它有两个参数:第一个是异步通道,第二个就是上面传入的NioServer对象
@Override
public void completed(AsynchronousSocketChannel asc, Nio2Server attachment) {
//调用accept方法继续接收其他客户端的请求
attachment.assc.accept(attachment, this);
//1. 先分配好Buffer,告诉内核,数据拷贝到哪里去
ByteBuffer buf = ByteBuffer.allocate(1024);
//2. 调用read函数读取数据,除了把buf作为参数传入,还传入读回调类
channel.read(buf, buf, new ReadHandler(asc));
}
我们看到它实现了CompletionHandler接口,下面我们先来看看CompletionHandler接口的定义。
public interface CompletionHandler<V,A> {
void completed(V result, A attachment);
void failed(Throwable exc, A attachment);
}
CompletionHandler接口有两个模板参数V和A,分别表示I/O调用的返回值和附件类。比如accept的返回值就是AsynchronousSocketChannel,而附件类由用户自己决定,在accept的调用中,我们传入了一个Nio2Server。因此AcceptHandler带有了两个模板参数:AsynchronousSocketChannel和Nio2Server。
CompletionHandler有两个方法:completed和failed,分别在I/O操作成功和失败时调用。completed方法有两个参数,其实就是前面说的两个模板参数。也就是说,Java的NIO.2在调用回调方法时,会把返回值和附件类当作参数传给NIO.2的使用者。
下面我们再来看看处理读的回调类ReadHandler长什么样子。
public class ReadHandler implements CompletionHandler<Integer, ByteBuffer> {
//读取到消息后的处理
@Override
public void completed(Integer result, ByteBuffer attachment) {
//attachment就是数据,调用flip操作,其实就是把读的位置移动最前面
attachment.flip();
//读取数据
...
}
void failed(Throwable exc, A attachment){
...
}
}
read调用的返回值是一个整型数,所以我们回调方法里的第一个参数就是一个整型,表示有多少数据被读取到了Buffer中。第二个参数是一个ByteBuffer,这是因为我们在调用read方法时,把用来存放数据的ByteBuffer当作附件类传进去了,所以在回调方法里,有ByteBuffer类型的参数,我们直接从这个ByteBuffer里获取数据。
掌握了Java NIO.2 API的使用以及服务端程序的工作原理之后,再来理解Tomcat的异步I/O实现就不难了。我们先通过一张图来看看Nio2Endpoint有哪些组件。
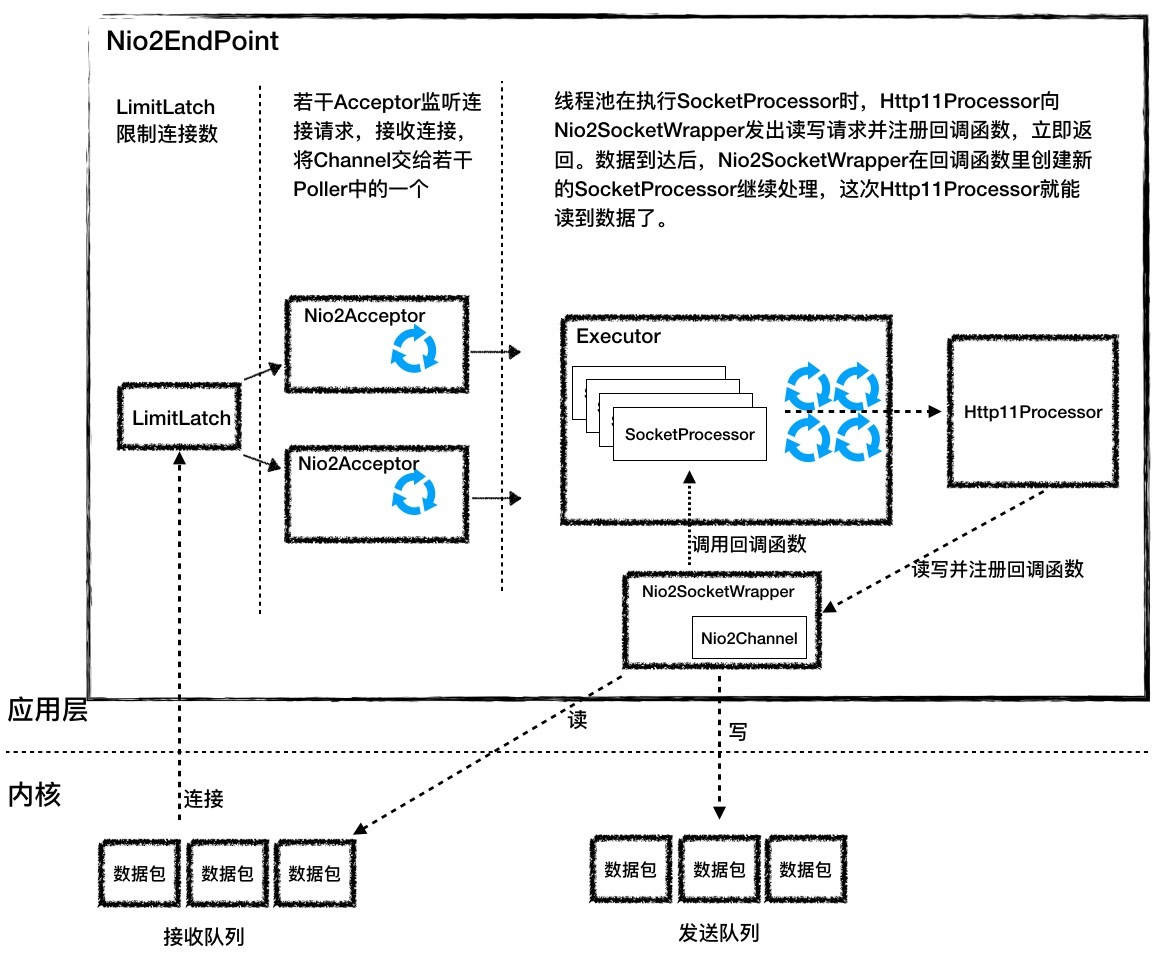
从图上看,总体工作流程跟NioEndpoint是相似的。
LimitLatch是连接控制器,它负责控制最大连接数。
Nio2Acceptor扩展了Acceptor,用异步I/O的方式来接收连接,跑在一个单独的线程里,也是一个线程组。Nio2Acceptor接收新的连接后,得到一个AsynchronousSocketChannel,Nio2Acceptor把AsynchronousSocketChannel封装成一个Nio2SocketWrapper,并创建一个SocketProcessor任务类交给线程池处理,并且SocketProcessor持有Nio2SocketWrapper对象。
Executor在执行SocketProcessor时,SocketProcessor的run方法会调用Http11Processor来处理请求,Http11Processor会通过Nio2SocketWrapper读取和解析请求数据,请求经过容器处理后,再把响应通过Nio2SocketWrapper写出。
需要你注意Nio2Endpoint跟NioEndpoint的一个明显不同点是,Nio2Endpoint中没有Poller组件,也就是没有Selector。这是为什么呢?因为在异步I/O模式下,Selector的工作交给内核来做了。
接下来我详细介绍一下Nio2Endpoint各组件的设计。
Nio2Acceptor
和NioEndpint一样,Nio2Endpoint的基本思路是用LimitLatch组件来控制连接数,但是Nio2Acceptor的监听连接的过程不是在一个死循环里不断地调accept方法,而是通过回调函数来完成的。我们来看看它的连接监听方法:
serverSock.accept(null, this);
其实就是调用了accept方法,注意它的第二个参数是this,表明Nio2Acceptor自己就是处理连接的回调类,因此Nio2Acceptor实现了CompletionHandler接口。那么它是如何实现CompletionHandler接口的呢?
protected class Nio2Acceptor extends Acceptor<AsynchronousSocketChannel>
implements CompletionHandler<AsynchronousSocketChannel, Void> {
@Override
public void completed(AsynchronousSocketChannel socket,
Void attachment) {
if (isRunning() && !isPaused()) {
if (getMaxConnections() == -1) {
//如果没有连接限制,继续接收新的连接
serverSock.accept(null, this);
} else {
//如果有连接限制,就在线程池里跑run方法,run方法会检查连接数
getExecutor().execute(this);
}
//处理请求
if (!setSocketOptions(socket)) {
closeSocket(socket);
}
}
}
可以看到CompletionHandler的两个模板参数分别是AsynchronousServerSocketChannel和Void,我在前面说过第一个参数就是accept方法的返回值,第二个参数是附件类,由用户自己决定,这里为Void。completed方法的处理逻辑比较简单:
接着completed方法会调用setSocketOptions方法,在这个方法里,会创建Nio2SocketWrapper和SocketProcessor,并交给线程池处理。
Nio2SocketWrapper
Nio2SocketWrapper的主要作用是封装Channel,并提供接口给Http11Processor读写数据。讲到这里你是不是有个疑问:Http11Processor是不能阻塞等待数据的,按照异步I/O的套路,Http11Processor在调用Nio2SocketWrapper的read方法时需要注册回调类,read调用会立即返回,问题是立即返回后Http11Processor还没有读到数据,怎么办呢?这个请求的处理不就失败了吗?
为了解决这个问题,Http11Processor是通过2次read调用来完成数据读取操作的。
这个回调类readCompletionHandler的源码如下,最关键的一点是,Nio2SocketWrapper是作为附件类来传递的,这样在回调函数里能拿到所有的上下文。
this.readCompletionHandler = new CompletionHandler<Integer, SocketWrapperBase<Nio2Channel>>() {
public void completed(Integer nBytes, SocketWrapperBase<Nio2Channel> attachment) {
...
//通过附件类SocketWrapper拿到所有的上下文
Nio2SocketWrapper.this.getEndpoint().processSocket(attachment, SocketEvent.OPEN_READ, false);
}
public void failed(Throwable exc, SocketWrapperBase<Nio2Channel> attachment) {
...
}
}
在异步I/O模型里,内核做了很多事情,它把数据准备好,并拷贝到用户空间,再通知应用程序去处理,也就是调用应用程序注册的回调函数。Java在操作系统 异步IO API的基础上进行了封装,提供了Java NIO.2 API,而Tomcat的异步I/O模型就是基于Java NIO.2 实现的。
由于NIO和NIO.2的API接口和使用方法完全不同,可以想象一个系统中如果已经支持同步I/O,要再支持异步I/O,改动是比较大的,很有可能不得不重新设计组件之间的接口。但是Tomcat通过充分的抽象,比如SocketWrapper对Channel的封装,再加上Http11Processor的两次read调用,巧妙地解决了这个问题,使得协议处理器Http11Processor和I/O通信处理器Endpoint之间的接口保持不变。
我在文章开头介绍Java NIO.2的使用时,提到过要创建一个线程池来处理异步I/O的回调,那么这个线程池跟Tomcat的工作线程池Executor是同一个吗?如果不是,它们有什么关系?
不知道今天的内容你消化得如何?如果还有疑问,请大胆的在留言区提问,也欢迎你把你的课后思考和心得记录下来,与我和其他同学一起讨论。如果你觉得今天有所收获,欢迎你把它分享给你的朋友。