你好,我是陈现麟。
通过上一节课的介绍,你已经了解了分布式系统出现的原因和引入的新问题,并且我们一起讨论了这些新问题的处理思路。你对分布式系统的全局已经有了一个初步的认识,这就为后面的学习打下了良好的基础。
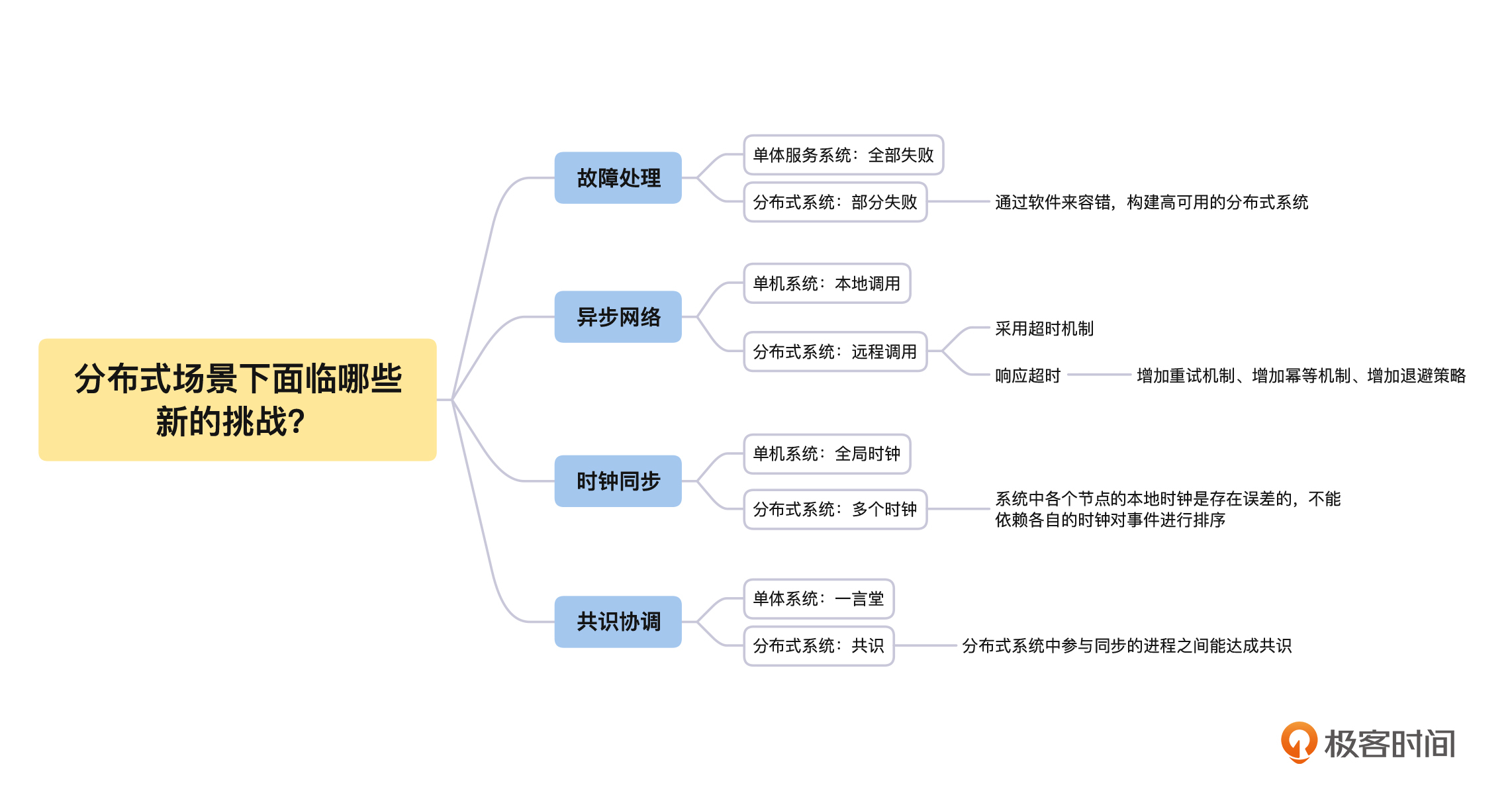
下一步,我们要从根本上理解分布式系统的设计方法和原则,这就需要你时刻谨记单体系统和分布式系统之间的差别。从本质上来说,单体系统是以单进程的形式运行在一个计算机节点上,而分布式系统是以多进程的形式运行在多个计算机节点上,二者的本质差别就导致了分布式系统面临着四个方面的新问题,分别是:故障处理、异步网络、时钟同步和共识协同。
所以,在这节课中,我们会从上述的四个方面来比较单体系统和分布式系统的差别,一起来探讨分布式系统会面临哪些新的挑战,而这些挑战又是怎么影响分布式系统的架构和设计的。
故障处理是所有系统都必须考虑的关键问题,所以我们从故障处理的角度开始分析。
单体服务系统中,在硬件正常的时候,对于一个确定的输入,总会得到一个确定的输出。就算是在内存、磁盘损坏等硬件异常的时候,对于一个确定的输入,计算机也会直接出现无法启动或崩溃的情况,而不是给出一个模棱两可或不正确的结果。
这种全部失败的处理逻辑,会大大减轻用户使用计算机的心智负担,让我们明确地知道,如果系统内部发生了故障,计算机不会给出错误的结果,而是会全部崩溃。那么处理计算机系统崩溃的方法就非常明确和简单了,重启计算机,重新运行程序即可。
相反,如果计算机给出了一个错误的结果,这些错误的结果和正常的结果混在一起,我们是无法感知的。比如一次硬件故障,导致所有的 0 都变成了 1 ,并且写入到了数据库中这种情况,它的代码逻辑是正确的,那么想要识别出来,再运行处理的成本就非常大了。
曾经某知名支付公司的系统实现了异地冷备,也就是除主机房外,在外地还有一个备用机房,备用机房运行的程序和主机房一模一样,只是不处理用户请求而已。但是有一次主机房故障时,这家公司并没有将流量切到冷备的机房。
公司这样考虑的主要原因是,虽然主机房故障,会导致系统暂时不能对外服务,出现很大的损失,但是这样的损失是能够评估出来的;可是,如果将流量切到冷备的机房去服务用户,很可能会出现其他不可预知的错误,这样产生的损失就无法评估了,结果也是我们不能承受的。
分布式系统由多个计算机节点组成,虽然每一个计算机节点都是全部失败的模型,但是如果系统中的某些节点出现宕机或者网络故障,整个分布式系统就会出现部分失败的情况,也就是说单机计算机系统这个确定性的全部失败的模型,在分布式系统中就无效了。这个问题大大增加了分布式系统的复杂性,也给我们处理分布式问题提高了难度。
部分失败的情况是构建分布式系统的一个大挑战,也深刻影响着分布式系统的设计方式和原则。在分布式系统中,我们需要接受部分失败,接受系统中每一个部分可能出现故障的情况,在不可靠的硬件上通过软件来容错,构建高可用的分布式系统。
所以,在分布式系统中,故障处理是软件设计的一个重要组成部分。我们需要时刻谨记节点宕机、网络分区等各种问题出现时,系统应该怎么正确处理,比如分布式系统在设计的时候,每一个组件都必须是高可用的。
在网络出现分区的时候,系统必须能够正确处理,在网络分区恢复的时候,系统也必须正确处理,不能出现不可预知的错误,特别是在进行数据复制的时候。
接下来,我们还要从当前广泛使用的异步网络的角度来分析。单体系统和分布式系统对网络的依赖程度有非常明显的差别,单体内部几乎不依赖网络,但是网络却是架构分布式系统的根基。
在单机系统中,系统各个组件之间的调用方式非常简单,直接本地调用即可。但是在分布式系统中,不同的组件运行在不同的机器上,通过本地调用是不可行的,我们只能通过网络来进行调用,即远程调用。
虽然两个调用的差别只在于远程调用多依赖了网络这个通道,但是这却给系统带来了非常大的复杂性,其实主要原因还是网络本身的复杂性所导致的。所以接下来,我们再一起讨论一下网络带给系统的复杂性。单机系统的本地调用方式,我们可以理解为只要发起调用,调用操作就一定会执行,并且我们可以忽略调用方和被调用方之间的数据传递时间。
但是单机系统的本地调用模型在远程调用上是不成立的,因为远程调用是通过网络来发送数据的,而我们目前依赖的网络是异步的,从一个节点发送数据到另一个节点,不能保证在多少时间内到达,甚至不能保证一定能到达;如果网络是同步的,能够保证从一个节点发送到另一个节点的数据,最慢会在多长时间内一定能到达,这样就可以大大简化远程调用带来的复杂性了。
这个时候你一定在想,我们能不能实现一个同步网络呢?其实是可以实现的,如果从节点 A 发送数据到节点 B,我们只需在节点 A 和节点 B 之间,建立一条带宽充足的专门链路,用于这一次数据的传递就可以达到要求。可是,这样会导致整个网络的效率太低,对于目前的互联网来说是不现实的。
比如,你开车从北京到上海,如果直接走目前的公路网,什么时候能到上海,这个时间是不能确定的,因为一路上很多地方会出现不同程度的堵车。但是如果指定一条专线给你,这条专线只能走你的车,其他人的车都不能走,这样就肯定不会堵车,你也可以准确计算出从北京到上海的开车时间。但是在这个例子中,你也能看到专线模式会导致整个公路网络的运行效率非常低,所以这种情况在我们的日常生活中是不可能实现的。
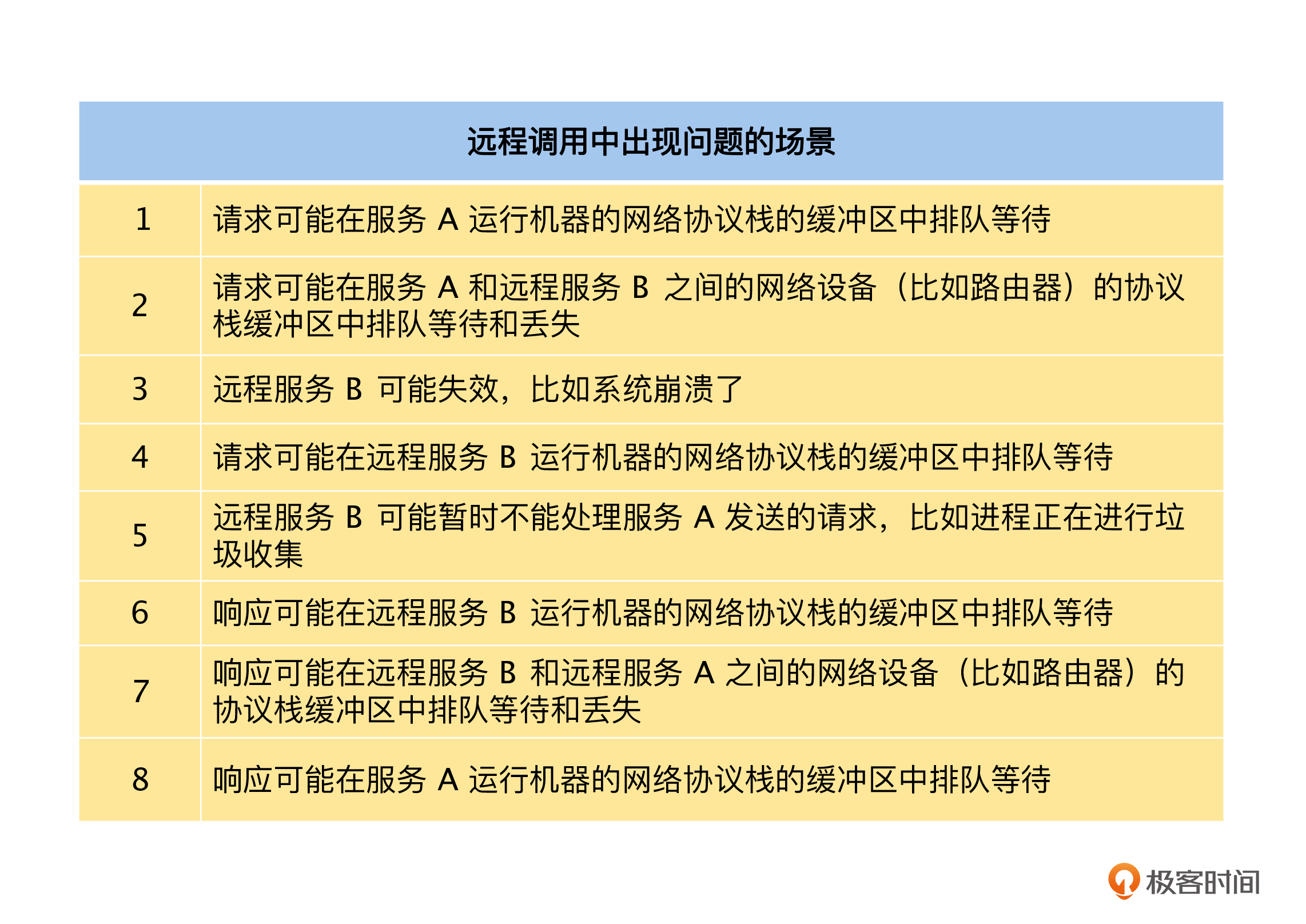
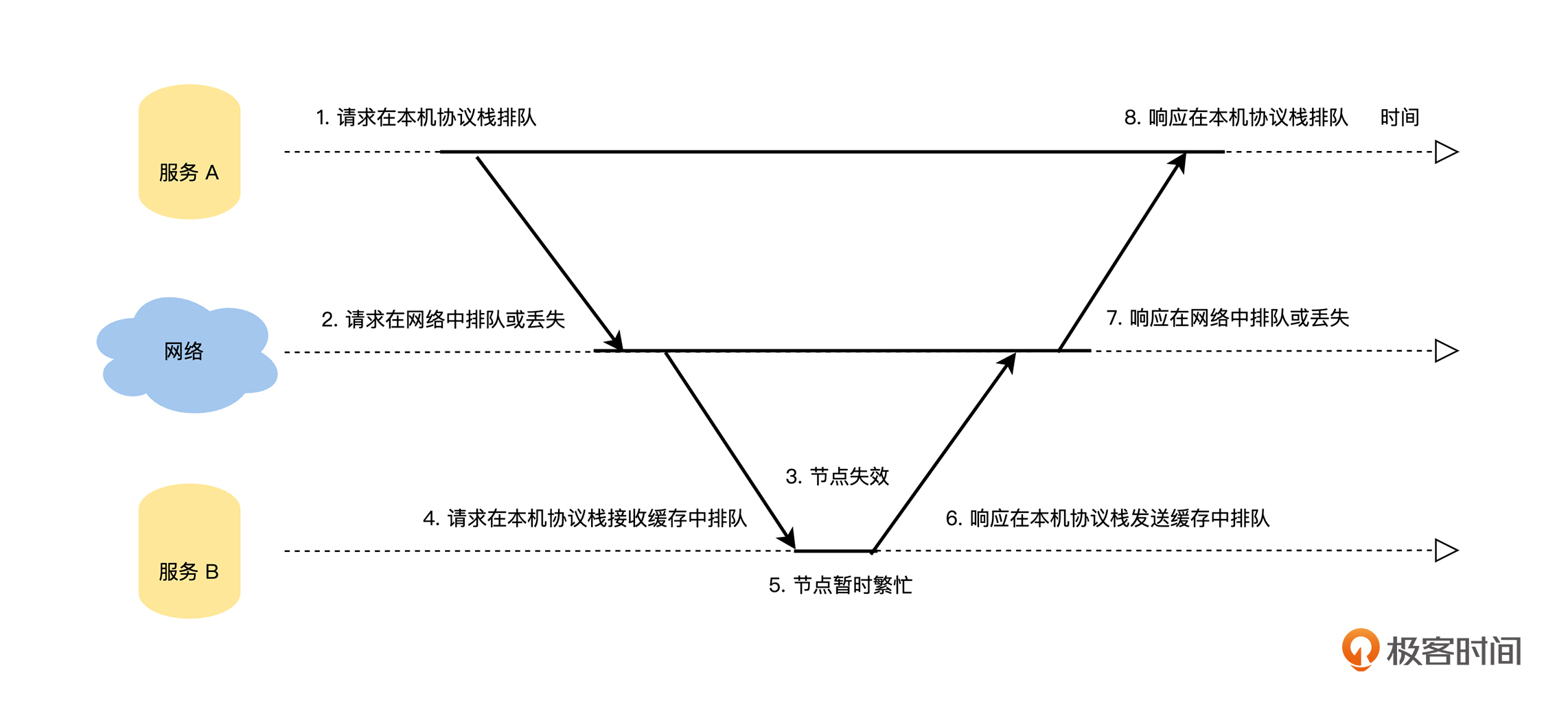
所以你会发现,远程调用在时间上有不确定性,那么我们就来讨论一下,服务 A 通过网络远程调用服务 B 可能会出现哪些不确定的情况。在我们使用极客时间 App 的过程中,如果出现加载不出来或者系统内部错误的问题,主要和远程调用模型面临的网络排队、丢包和请求服务崩溃等情况有关,具体的场景和示意图如下:
在这样的情况下,通常的做法是采用超时机制,请求方在发起请求后,设置一个超时时间,这样能确保请求方在超时时间内,一定能得到一个响应。如果在超时时间内,请求方得到了明确的响应,不论这个响应是被调用服务回复的,还是网络地址不可达等网络错误,调用方都可以根据响应结果一一来处理。
比如,极客时间的用户去购买一个课程,如果订单服务响应为购买成功或者余额不足,我们可以将回复反馈给用户;如果是网络地址不可达,我们就可以知道这个购买请求还没有被订单服务处理过,可以采取重试等其他的办法来处理。
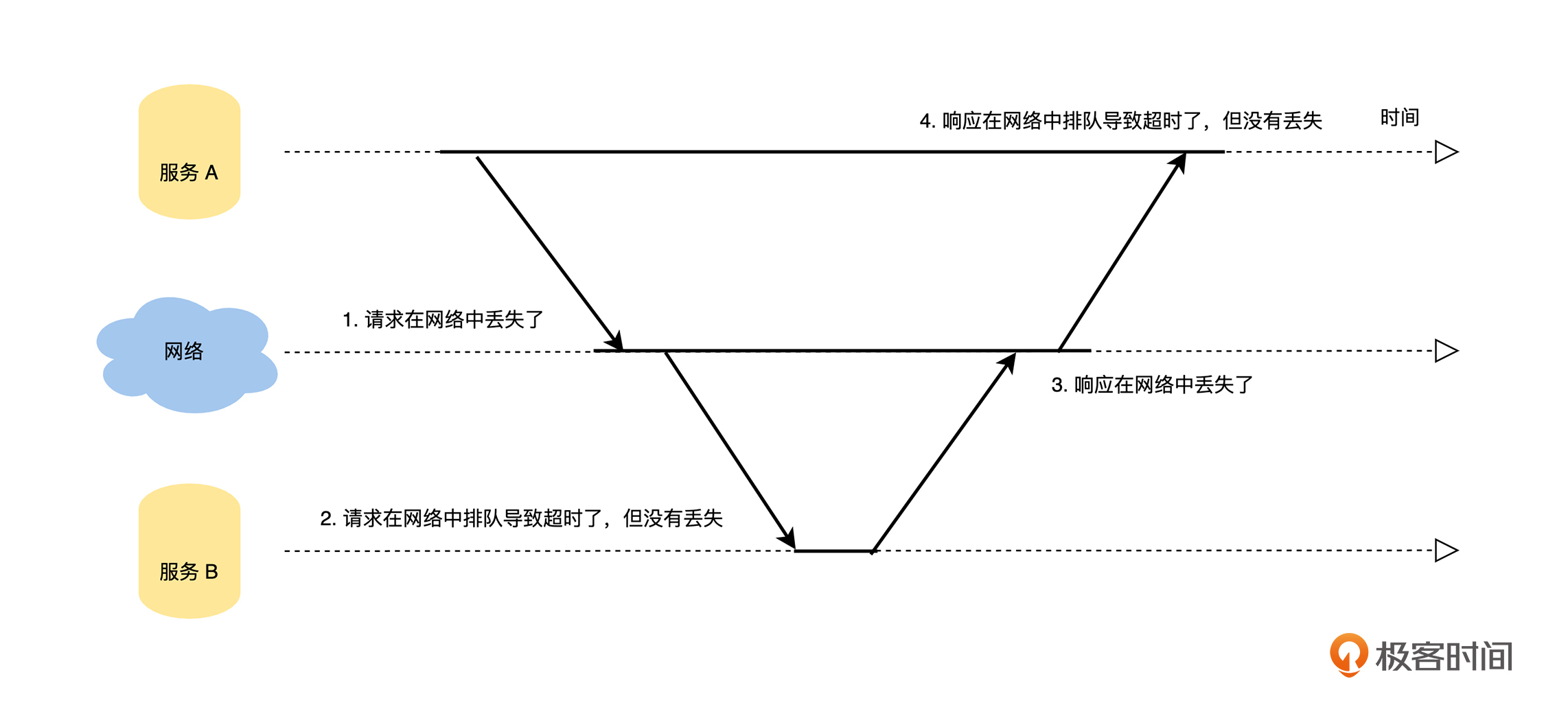
但是,如果请求在超时时间内没有收到任何响应,即响应超时,那么调用方将无法区分下面四种情况:
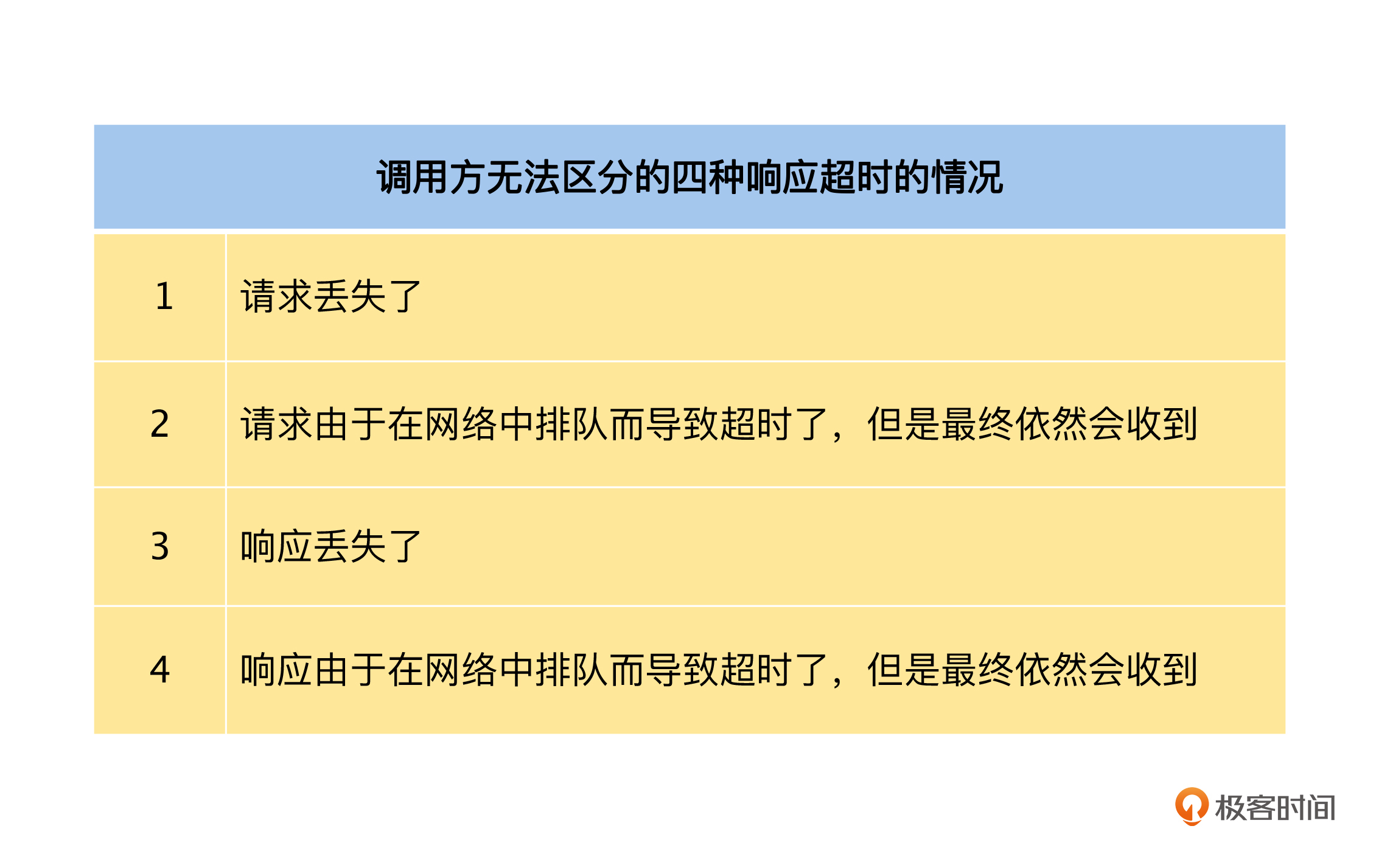
在响应超时的情况下,如果调用方想确保这个请求被执行,只能重新发送刚刚的请求。但是,如果之前的请求只是在网络中延迟或者响应丢失了,例如上面 2、3 和 4 中描述的情况,重试操作会导致这个请求被多次执行;如果之前的请求在网络中丢失了,例如上面 1 描述的情况,那么调用方不进行重试的话,这个请求就会出现一次都没有被执行过的情况。
所以,在分布式系统的设计中,我们要充分考虑通过网络进行远程调用导致的不确定性,比如在响应超时的情况下增加重试机制,确保请求能最少执行一次。在重试的时候增加幂等的机制,确保请求只被精确处理一次,并且对重试机制增加退避策略,确保系统不会因为重试导致雪崩。
我们在上面讨论了故障处理和异步网络带来的挑战,接下来我们再一起来探讨分布式系统多个时钟的问题,从时钟同步的角度继续分析分布式系统面临的挑战。
计算机系统一般是通过石英钟来计算时间的,但是石英钟的振动频率会随着温度等原因变慢或变快,所以在运行时间比较长后,计算机系统的时间可能会发生比较大的误差,所以人们又增加了一组专门的时间服务器。我们可以认为这些时间服务器的时间是准确的,计算机系统通过网络定期获得时间服务器的时间,来调整本地时间,即网络时间协议(NTP)。我们可以通过下面的公式来计算当时的时间:
本地时间 = 时间服务器的返回时间 + 时间服务器响应的网络时延
这里我们可以来回忆一下,刚才我们在远程调用的话题中,知道了网络时延是不可预测的,所以通过 NTP 我们依然无法获得准确的时间,一般的精度都是在几十毫秒的范围内。不过,这个精度对于单机系统来说是足够的,我们一起来看看这是为什么。
在计算机系统中,时间主要有两个作用,第一个是记录事件发生的时间,这是一个绝对时间,是让我们来阅读和理解的。我们平时使用时间的精度一般为分钟,对于几十毫秒的误差是毫无感知的,比如我们经常说今天 12 点 30 分做了什么事情,很少提到多少秒,毫秒就更不会提了。
第二个是记录事件之间的发生顺序,这是一个相对时间。我们平时只关心事件之间的顺序,对于精度是没有要求的,比如对同一个字段的两个修改操作,我们认为一定是后一个的修改操作覆盖前一个操作的数据。
在单机系统中,由于只有一个时钟,先执行的事件一定能获得更小的时间,通过本地时钟就可以确保全局事件之间顺序的正确性,所以单机系统是一个全局时钟的模型。
而分布式系统是由多台计算机节点组成的,每一个节点都有自己的时钟,并且计算机执行的速度非常快,在一个毫秒内可以做非常多的事情。在这种情况下,如果在每一个节点,我们都采用本地的时钟来记录事件的发生时间,然后基于多个节点上的事件按发生时间进行排序,就很容易出现时间穿越的问题。下面我举例来分析,你可以结合下图进行思考。
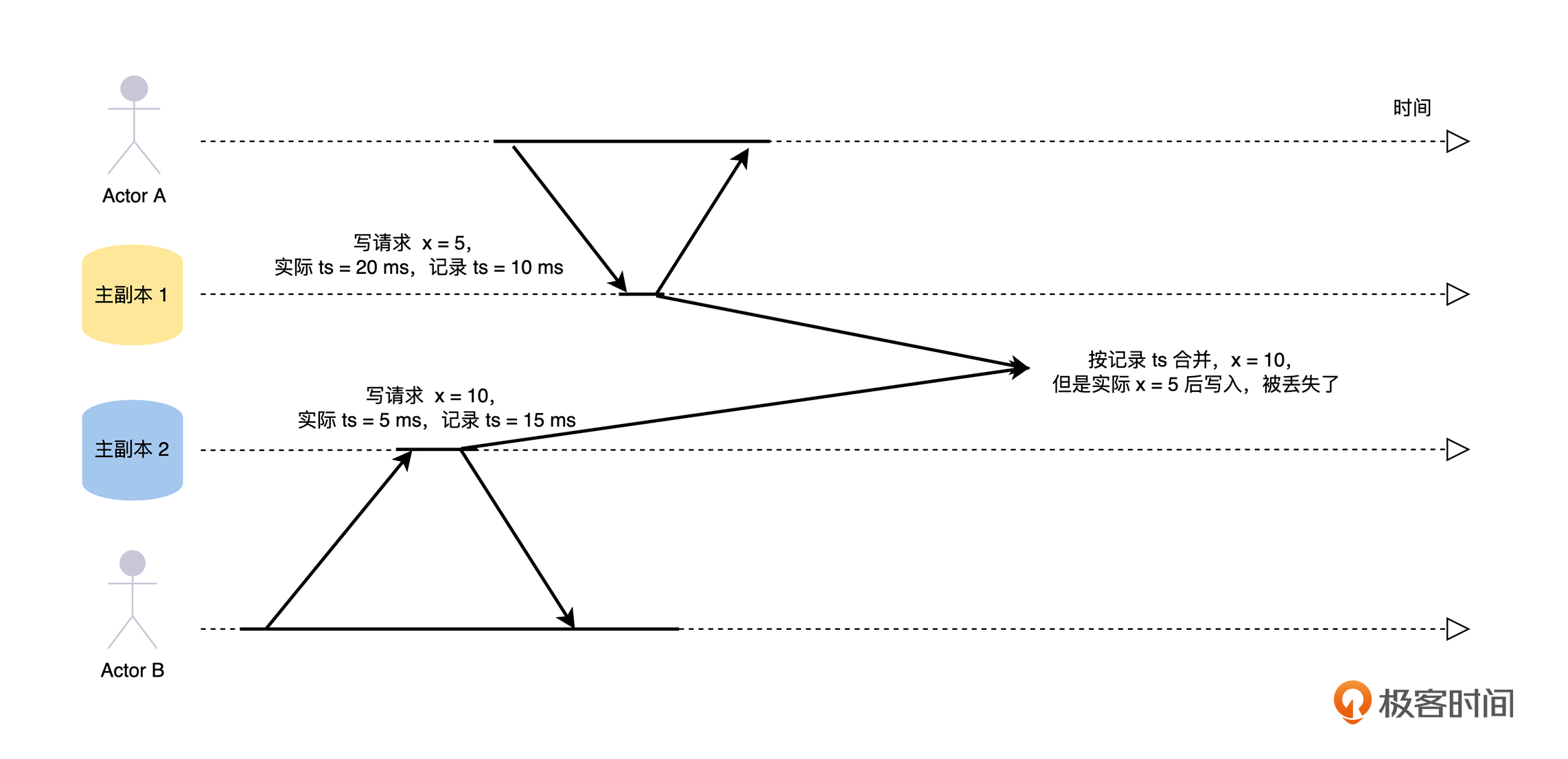
比如在多主复制的情况下,客户端 A 在主副本 1 修改了 x = 5,记录时间为 10 ms,但是该副本时间慢了 10 ms,所以实际时间为 20 ms。几乎同一时间,客户端 B 在主副本 2 修改了 x = 10,记录时间为 15 ms,但是该副本时间快了 10 ms,所以实际时间为 5 ms。
一般对于这种情况的处理策略是最后写入获胜(LWW),在数据合并的时候,如果按照主副本 1、2 的记录时间来处理的话,最终 x = 10,会导致主副本 1 的修改丢失。
所以,在分布式系统的设计中,我们一定要谨记系统中各个节点的本地时钟是存在误差的,不能依赖各自的时钟对事件进行排序。
一般对于这个问题的解决思路有两个,一个是回到单机系统的全局时钟的模式,所有节点对于需要排序的事件时间,不使用本地时钟的时间,而是去请求同一个时间服务器获得事件的发生时间,然后依据这个时间进行排序;另一个是 Google 在 Spanner 中使用的,通过 GPS 和原子钟实现 TrueTime API 来解决。对于这一块内容,在课程的“事务(三)”中有详细的介绍,这里就不再赘述了。
最后,我们不要忘记分布式系统内部,多个实例或服务之间的协同问题,所以,我们接下来从共识协调的角度来分析。
在计算机系统中,我们经常要面对这样的情况:同时只允许一个线程操作某一个数据,和同时只允许一个线程执行某一个操作,如果不遵守这个规则,就可能会导致数据错误等不可预料的后果,这就是线程之间的同步操作。
在单体系统中,需要协同的多个线程是属于同一个进程的,所以同步操作很简单,直接使用进程内的资源来做协同就可以了,比如锁、信号量等。对于这些线程来说,所有的同步操作都以进程的资源为准,就好像进程是一个一言堂的管理员,协同进程内部的所有线程之间的同步。
但是,单体系统的单进程、多线程的同步模型,对于分布式系统是不适用的,因为分布式系统中各个组件都是独立的进程,运行在不同的机器上。所以,对于分布式系统来说,我们需要处理的是一个跨机器的多进程同步问题。那么,我们应该怎么来解决呢?
聪明的你应该很快就能想到一个方法,我们选择一个服务来做同步操作的管理者(我们称为同步服务),在多个进程间需要同步时,就到同步服务来请求一个锁,获得锁的进程就可以操作,其他的进程就必须等待。
这样看似将问题解决了,但是结合我们前面讨论过的,在做分布式系统设计的时候,我们必须要考虑到故障的存在,所以同步服务不能只有一个实例,它需要多个实例来保障它的高可用,那么同步服务应该由哪一个实例,来处理其他进程的同步请求呢?
你可能会想通过配置直接指定一个,这确实解决了同步服务启动时的问题,但是如果被指定实例宕机了,接下来该由哪一个实例来继续处理同步请求呢?
所以,我们通过这些讨论,会发现问题依然没有解决,只是转移了,也就是将分布式系统的多进程同步问题变成了同步服务的选主问题。其实,这是一个共识问题,需要分布式系统中参与同步的进程之间能达成共识,目前我们是通过 Paxos 或者 Raft 这样的共识算法来解决问题的。对于这一块内容,在后面的“一致性与共识”课程中会有详细的介绍,这里就不再赘述了。
到这里,我们一起讨论了在分布式系统场景下面临的新挑战,我们一起来总结一下这节课的主要内容:
 首先,分布式系统由多个单机计算机节点组成,在系统中的某些节点出现故障或者网络故障时,整个分布式系统都会出现部分失败的情况。所以我们需要接受部分失败,接受系统每一个部分可能出现故障的情况,在不可靠的硬件上通过软件来容错,构建高可用的分布式系统。
首先,分布式系统由多个单机计算机节点组成,在系统中的某些节点出现故障或者网络故障时,整个分布式系统都会出现部分失败的情况。所以我们需要接受部分失败,接受系统每一个部分可能出现故障的情况,在不可靠的硬件上通过软件来容错,构建高可用的分布式系统。
然后,在分布式系统中,不同的组件运行在不同的机器上,只能通过网络来进行远程调用。当远程调用由于网络原因异常失败时,我们无法区分当前的请求是否被执行过,于是如何确保请求只被精确处理一次成为了分布式场景下新的挑战。
接着,我们了解到分布式系统是由多台计算机节点组成的,每一个节点都有自己的时钟,并且由于硬件和网络的原因,系统中各个节点的本地时钟是存在误差的,不能依赖各自时钟对事件进行排序,这就导致如何对系统中的事件进行排序,变成分布式场景下新的挑战。
最后,分布式系统各个组件都是独立的进程,运行在不同的机器上,这就导致单体系统的单进程、多线程的同步模型变成了跨机器的多进程同步模型,要解决这个问题,就需要分布式系统中参与同步的进程之间能达成共识。
分布式系统面临故障处理(部分失败)、异步网络、时钟同步和共识协调,这四个新的挑战和 CAP 理论之间是什么关系呢?
欢迎你在留言区发表你的看法。如果这节课对你有帮助,也推荐你分享给更多的同事、朋友。