上一讲,我们看到,要能够实现一个完整的CPU功能,除了加法器这样的电路之外,我们还需要实现其他功能的电路。其中有一些电路,和我们实现过的加法器一样,只需要给定输入,就能得到固定的输出。这样的电路,我们称之为组合逻辑电路(Combinational Logic Circuit)。
但是,光有组合逻辑电路是不够的。你可以想一下,如果只有组合逻辑电路,我们的CPU会是什么样的?电路输入是确定的,对应的输出自然也就确定了。那么,我们要进行不同的计算,就要去手动拨动各种开关,来改变电路的开闭状态。这样的计算机,不像我们现在每天用的功能强大的电子计算机,反倒更像古老的计算尺或者机械计算机,干不了太复杂的工作,只能协助我们完成一些计算工作。
这样,我们就需要引入第二类的电路,也就是时序逻辑电路(Sequential Logic Circuit)。时序逻辑电路可以帮我们解决这样几个问题。
第一个就是自动运行的问题。时序电路接通之后可以不停地开启和关闭开关,进入一个自动运行的状态。这个使得我们上一讲说的,控制器不停地让PC寄存器自增读取下一条指令成为可能。
第二个是存储的问题。通过时序电路实现的触发器,能把计算结果存储在特定的电路里面,而不是像组合逻辑电路那样,一旦输入有任何改变,对应的输出也会改变。
第三个本质上解决了各个功能按照时序协调的问题。无论是程序实现的软件指令,还是到硬件层面,各种指令的操作都有先后的顺序要求。时序电路使得不同的事件按照时间顺序发生。
想要实现时序逻辑电路,第一步我们需要的就是一个时钟。我在第3讲说过,CPU的主频是由一个晶体振荡器来实现的,而这个晶体振荡器生成的电路信号,就是我们的时钟信号。
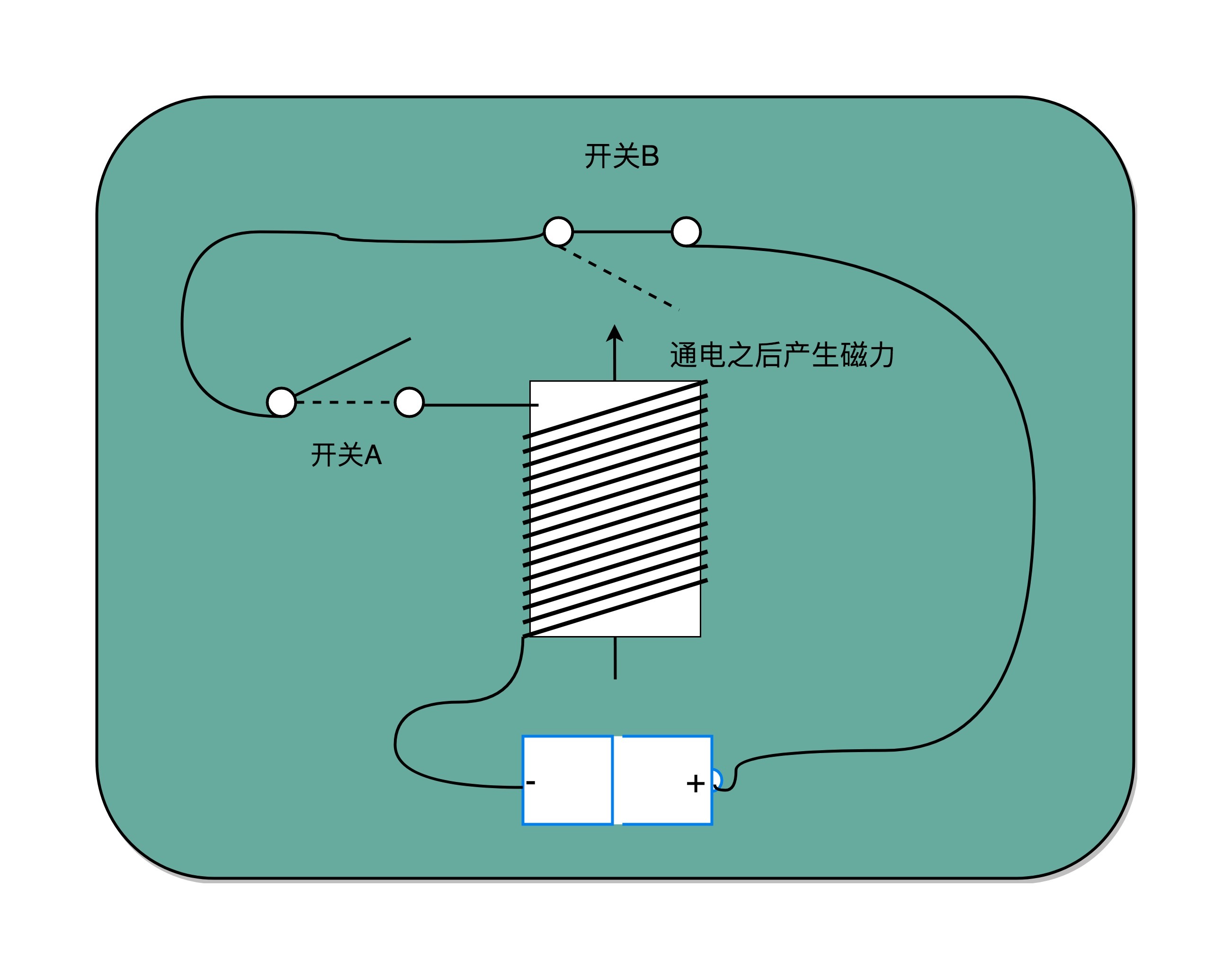
实现这样一个电路,和我们之前讲的,通过电的磁效应产生开关信号的方法是一样的。只不过,这里的磁性开关,打开的不再是后续的线路,而是当前的线路。
在下面这张图里你可以看到,我们在原先一般只放一个开关的信号输入端,放上了两个开关。一个开关A,一开始是断开的,由我们手工控制;另外一个开关B,一开始是合上的,磁性线圈对准一开始就合上的开关B。
于是,一旦我们合上开关A,磁性线圈就会通电,产生磁性,开关B就会从合上变成断开。一旦这个开关断开了,电路就中断了,磁性线圈就失去了磁性。于是,开关B又会弹回到合上的状态。这样一来,电路接通,线圈又有了磁性。我们的电路就会来回不断地在开启、关闭这两个状态中切换。
这个不断切换的过程,对于下游电路来说,就是不断地产生新的0和1这样的信号。如果你在下游的电路上接上一个灯泡,就会发现这个灯泡在亮和暗之间不停切换。这个按照固定的周期不断在0和1之间切换的信号,就是我们的时钟信号(Clock Signal)。
一般这样产生的时钟信号,就像你在各种教科书图例中看到的一样,是一个振荡产生的0、1信号。

这种电路,其实就相当于把电路的输出信号作为输入信号,再回到当前电路。这样的电路构造方式呢,我们叫作反馈电路(Feedback Circuit)。
接下来,我们还会看到更多的反馈电路。上面这个反馈电路一般可以用下面这个示意图来表示,其实就是一个输出结果接回输入的反相器(Inverter),也就是我们之前讲过的非门。

有了时钟信号,我们的系统里就有了一个像“自动门”一样的开关。利用这个开关和相同的反馈电路,我们就可以构造出一个有“记忆”功能的电路。这个有记忆功能的电路,可以实现在CPU中用来存储计算结果的寄存器,也可以用来实现计算机五大组成部分之一的存储器。

我们先来看下面这个RS触发器电路。这个电路由两个或非门电路组成。我在图里面,把它标成了A和B。
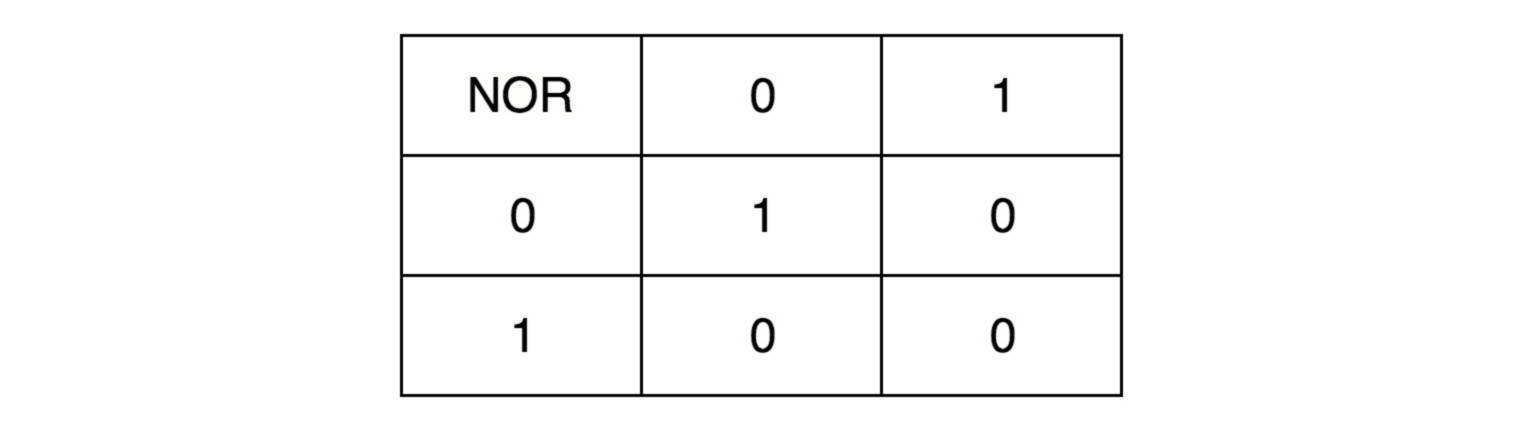
在这个电路一开始,输入开关都是关闭的,所以或非门(NOR)A的输入是0和0。对应到我列的这个真值表,输出就是1。而或非门B的输入是0和A的输出1,对应输出就是0。B的输出0反馈到A,和之前的输入没有变化,A的输出仍然是1。而整个电路的输出Q,也就是0。
当我们把A前面的开关R合上的时候,A的输入变成了1和0,输出就变成了0,对应B的输入变成0和0,输出就变成了1。B的输出1反馈给到了A,A的输入变成了1和1,输出仍然是0。所以把A的开关合上之后,电路仍然是稳定的,不会像晶振那样振荡,但是整个电路的输出Q变成了1。
这个时候,如果我们再把A前面的开关R打开,A的输入变成和1和0,输出还是0,对应的B的输入没有变化,输出也还是1。B的输出1反馈给到了A,A的输入变成了1和0,输出仍然是0。这个时候,电路仍然稳定。开关R和S的状态和上面的第一步是一样的,但是最终的输出Q仍然是1,和第1步里Q状态是相反的。我们的输入和刚才第二步的开关状态不一样,但是输出结果仍然保留在了第2步时的输出没有发生变化。
这个时候,只有我们再去关闭下面的开关S,才可以看到,这个时候,B有一个输入必然是1,所以B的输出必然是0,也就是电路的最终输出Q必然是0。
这样一个电路,我们称之为触发器(Flip-Flop)。接通开关R,输出变为1,即使断开开关,输出还是1不变。接通开关S,输出变为0,即使断开开关,输出也还是0。也就是,当两个开关都断开的时候,最终的输出结果,取决于之前动作的输出结果,这个也就是我们说的记忆功能。
这里的这个电路是最简单的RS触发器,也就是所谓的复位置位触发器(Reset-Set Flip Flop) 。对应的输出结果的真值表,你可以看下面这个表格。可以看到,当两个开关都是0的时候,对应的输出不是1或者0,而是和Q的上一个状态一致。

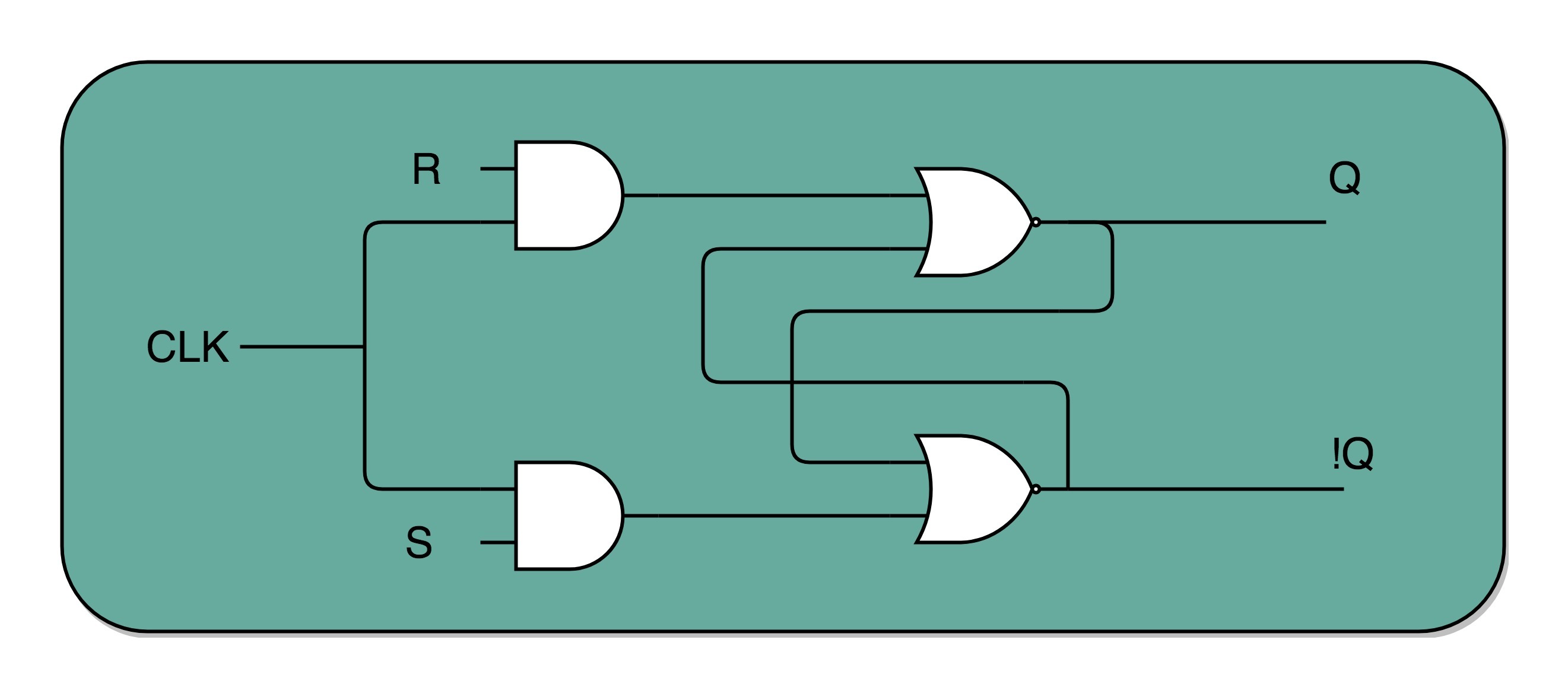
再往这个电路里加两个与门和一个小小的时钟信号,我们就可以实现一个利用时钟信号来操作一个电路了。这个电路可以帮我们实现什么时候可以往Q里写入数据。
我们看看下面这个电路,这个在我们的上面的R-S触发器基础之上,在R和S开关之后,加入了两个与门,同时给这两个与门加入了一个时钟信号CLK作为电路输入。
这样,当时钟信号CLK在低电平的时候,与门的输入里有一个0,两个实际的R和S后的与门的输出必然是0。也就是说,无论我们怎么按R和S的开关,根据R-S触发器的真值表,对应的Q的输出都不会发生变化。
只有当时钟信号CLK在高电平的时候,与门的一个输入是1,输出结果完全取决于R和S的开关。我们可以在这个时候,通过开关R和S,来决定对应Q的输出。
如果这个时候,我们让R和S的开关,也用一个反相器连起来,也就是通过同一个开关控制R和S。只要CLK信号是1,R和S就可以设置输出Q。而当CLK信号是0的时候,无论R和S怎么设置,输出信号Q是不变的。这样,这个电路就成了我们最常用的D型触发器。用来控制R和S这两个开关的信号呢,我们视作一个输入的数据信号D,也就是Data,这就是D型触发器的由来。

一个D型触发器,只能控制1个比特的读写,但是如果我们同时拿出多个D型触发器并列在一起,并且把用同一个CLK信号控制作为所有D型触发器的开关,这就变成了一个N位的D型触发器,也就可以同时控制N位的读写。
CPU里面的寄存器可以直接通过D型触发器来构造。我们可以在D型触发器的基础上,加上更多的开关,来实现清0或者全部置为1这样的快捷操作。
好了,到了这里,我们可以顺一顺思路了。通过引入了时序电路,我们终于可以把数据“存储”下来了。我们通过反馈电路,创建了时钟信号,然后再利用这个时钟信号和门电路组合,实现了“状态记忆”的功能。
电路的输出信号不单单取决于当前的输入信号,还要取决于输出信号之前的状态。最常见的这个电路就是我们的D触发器,它也是我们实际在CPU内实现存储功能的寄存器的实现方式。
这也是现代计算机体系结构中的“冯·诺伊曼”机的一个关键,就是程序需要可以“存储”,而不是靠固定的线路连接或者手工拨动开关,来实现计算机的可存储和可编程的功能。
有了时钟信号和触发器之后,我们还差一个“自动”需求没有实现。我们的计算机还不能做到自动地不停地从内存里面读取指令去执行。这一部分,我们留在下一讲。下一讲里,我们看看怎么让程序自动运转起来。
想要深入了解计算机里面的各种功能组件,是怎么通过电路来实现的,推荐你去阅读《编码:隐匿在计算机软硬件背后的语言》这本书的第14章和16章。
如果对于数字电路和数字逻辑特别感兴趣,想要彻底弄清楚数字电路、时序逻辑电路,也可以看一看计算机学科的一本专业的教科书《数字逻辑应用与设计》。
现在我们的CPU主频非常高了,通常在几GHz了,但是实际上我们的晶振并不能提供这么高的频率,而是通过“外频+倍频“的方式来实现高频率的时钟信号。请你研究一下,倍频和分频的信号是通过什么样的电路实现的?
欢迎留言和我分享你的疑惑和见解,也欢迎你把今天的内容分享给你的朋友,和他一起学习和进步。
评论