前面两节,我们讲了如何使用系统调用,创建进程和线程。你是不是觉得进程和线程管理,还挺复杂的呢?如此复杂的体系,在内核里面应该如何管理呢?
有的进程只有一个线程,有的进程有多个线程,它们都需要由内核分配CPU来干活。可是CPU总共就这么几个,应该怎么管理,怎么调度呢?你是老板,这个事儿得你来操心。
首先,我们得明确,公司的项目售前售后人员,接来了这么多的项目,这是个好事儿。这些项目都通过办事大厅立了项的,有的需要整个项目组一起开发,有的是一个项目组分成多个小组并行开发。无论哪种模式,到你这个老板这里,都需要有一个项目管理体系,进行统一排期、统一管理和统一协调。这样,你才能对公司的业务了如指掌。
那具体应该怎么做呢?还记得咱们平时开发的时候,用的项目管理软件Jira吧?它的办法对我们来讲,就很有参考意义。
我们这么来看,其实,无论是一个大的项目组一起完成一个大的功能(单体应用模式),还是把一个大的功能拆成小的功能并行开发(微服务模式),这些都是开发组根据客户的需求来定的,项目经理没办法决定,但是从项目经理的角度来看,这些都是任务,需要同样关注进度、协调资源等等。
同样在Linux里面,无论是进程,还是线程,到了内核里面,我们统一都叫任务(Task),由一个统一的结构task_struct进行管理。这个结构非常复杂,但你也不用怕,我们慢慢来解析。
接下来,我们沿着建立项目管理体系的思路,设想一下,Linux的任务管理都应该干些啥?
首先,所有执行的项目应该有个项目列表吧,所以Linux内核也应该先弄一个链表,将所有的task_struct串起来。
struct list_head tasks;
接下来,我们来看每一个任务都应该包含哪些字段。
每一个任务都应该有一个ID,作为这个任务的唯一标识。到时候排期啊、下发任务啊等等,都按ID来,就不会产生歧义。
task_struct里面涉及任务ID的,有下面几个:
pid_t pid;
pid_t tgid;
struct task_struct *group_leader;
你可能觉得奇怪,既然是ID,有一个就足以做唯一标识了,这个怎么看起来这么麻烦?这是因为,上面的进程和线程到了内核这里,统一变成了任务,这就带来两个问题。
第一个问题是,任务展示。
啥是任务展示呢?这么说吧,你作为老板,想了解的肯定是,公司都接了哪些项目,每个项目多少营收。什么项目执行是不是分了小组,每个小组是啥情况,这些细节,项目经理没必要全都展示给你看。
前面我们学习命令行的时候,知道ps命令可以展示出所有的进程。但是如果你是这个命令的实现者,到了内核,按照上面的任务列表把这些命令都显示出来,把所有的线程全都平摊开来显示给用户。用户肯定觉得既复杂又困惑。复杂在于,列表这么长;困惑在于,里面出现了很多并不是自己创建的线程。
第二个问题是,给任务下发指令。
如果客户突然给项目组提个新的需求,比如说,有的客户觉得项目已经完成,可以终止;再比如说,有的客户觉得项目做到一半没必要再进行下去了,可以中止,这时候应该给谁发指令?当然应该给整个项目组,而不是某个小组。我们不能让客户看到,不同的小组口径不一致。这就好比说,中止项目的指令到达一个小组,这个小组很开心就去休息了,同一个项目组的其他小组还干的热火朝天的。
Linux也一样,前面我们学习命令行的时候,知道可以通过kill来给进程发信号,通知进程退出。如果发给了其中一个线程,我们就不能只退出这个线程,而是应该退出整个进程。当然,有时候,我们希望只给某个线程发信号。
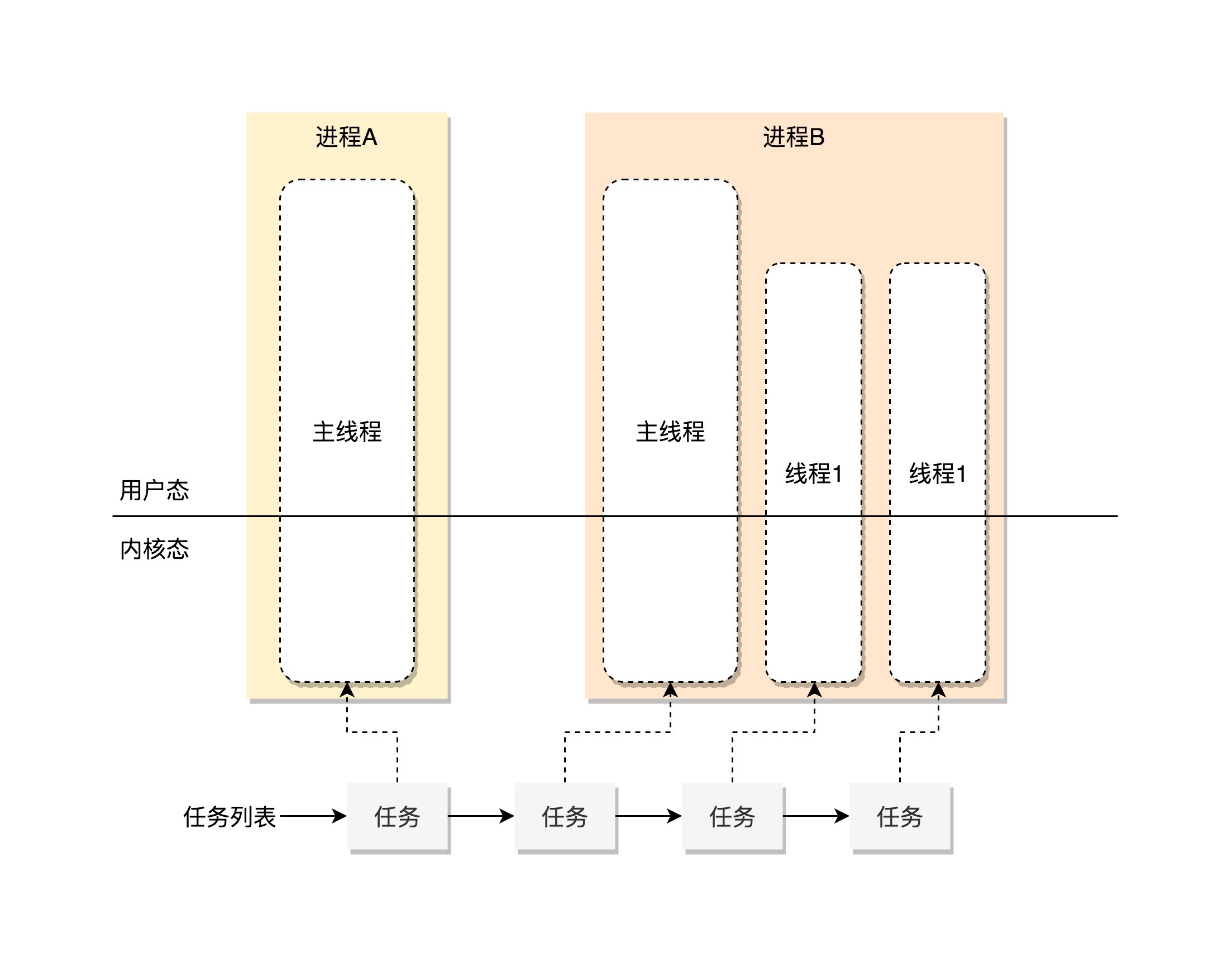
所以在内核中,它们虽然都是任务,但是应该加以区分。其中,pid是process id,tgid是thread group ID。
任何一个进程,如果只有主线程,那pid是自己,tgid是自己,group_leader指向的还是自己。
但是,如果一个进程创建了其他线程,那就会有所变化了。线程有自己的pid,tgid就是进程的主线程的pid,group_leader指向的就是进程的主线程。
好了,有了tgid,我们就知道tast_struct代表的是一个进程还是代表一个线程了。
这里既然提到了下发指令的问题,我就顺便提一下task_struct里面关于信号处理的字段。
/* Signal handlers: */
struct signal_struct *signal;
struct sighand_struct *sighand;
sigset_t blocked;
sigset_t real_blocked;
sigset_t saved_sigmask;
struct sigpending pending;
unsigned long sas_ss_sp;
size_t sas_ss_size;
unsigned int sas_ss_flags;
这里定义了哪些信号被阻塞暂不处理(blocked),哪些信号尚等待处理(pending),哪些信号正在通过信号处理函数进行处理(sighand)。处理的结果可以是忽略,可以是结束进程等等。
信号处理函数默认使用用户态的函数栈,当然也可以开辟新的栈专门用于信号处理,这就是sas_ss_xxx这三个变量的作用。
上面我说了下发信号的时候,需要区分进程和线程。从这里我们其实也能看出一些端倪。
task_struct里面有一个struct sigpending pending。如果我们进入struct signal_struct *signal去看的话,还有一个struct sigpending shared_pending。它们一个是本任务的,一个是线程组共享的。
关于信号,你暂时了解到这里就够用了,后面我们会有单独的章节进行解读。
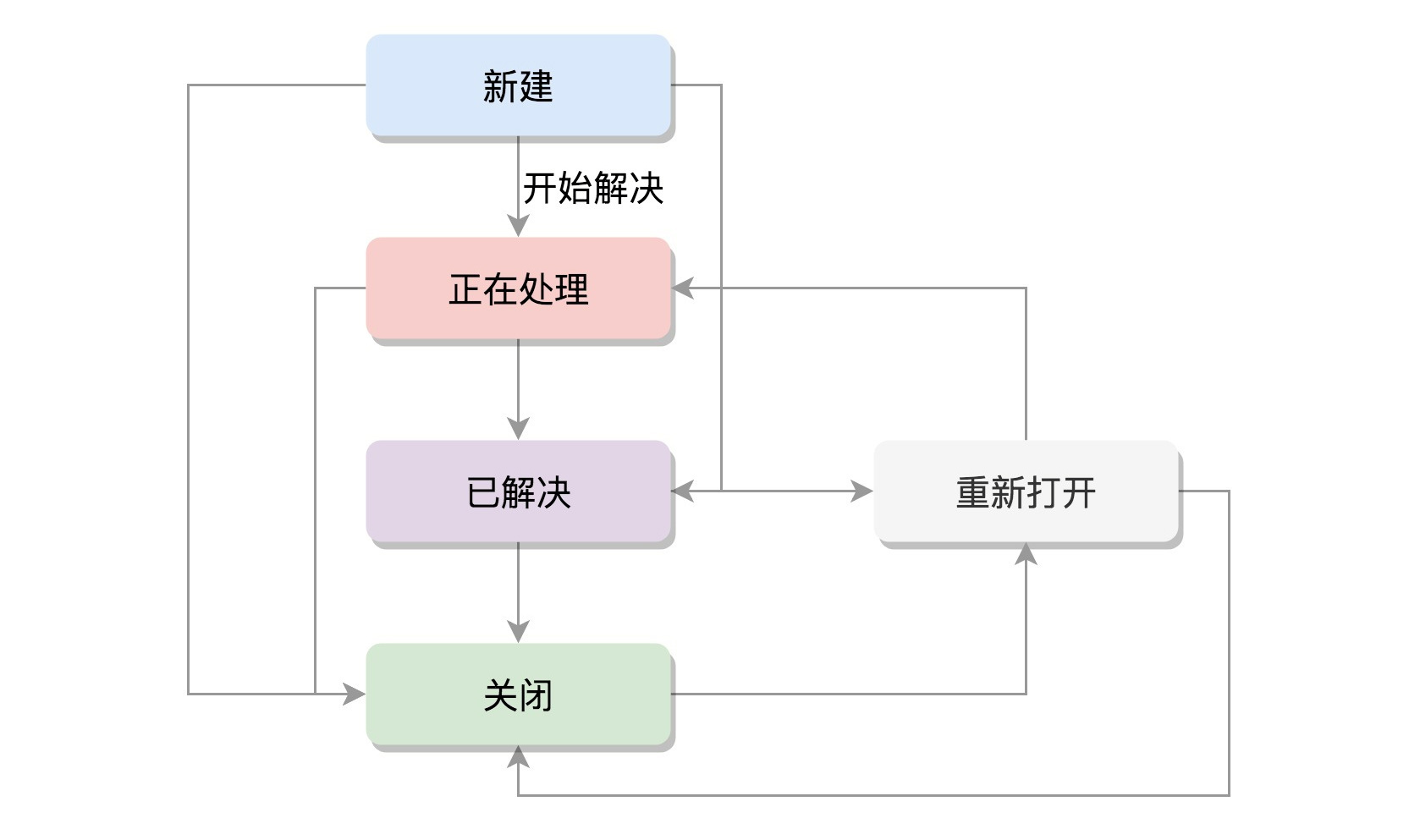
作为一个项目经理,另外一个需要关注的是项目当前的状态。例如,在Jira里面,任务的运行就可以分成下面的状态。
在task_struct里面,涉及任务状态的是下面这几个变量:
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
int exit_state;
unsigned int flags;
state(状态)可以取的值定义在include/linux/sched.h头文件中。
/* Used in tsk->state: */
#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define __TASK_STOPPED 4
#define __TASK_TRACED 8
/* Used in tsk->exit_state: */
#define EXIT_DEAD 16
#define EXIT_ZOMBIE 32
#define EXIT_TRACE (EXIT_ZOMBIE | EXIT_DEAD)
/* Used in tsk->state again: */
#define TASK_DEAD 64
#define TASK_WAKEKILL 128
#define TASK_WAKING 256
#define TASK_PARKED 512
#define TASK_NOLOAD 1024
#define TASK_NEW 2048
#define TASK_STATE_MAX 4096
从定义的数值很容易看出来,state是通过bitset的方式设置的,也就是说,当前是什么状态,哪一位就置一。
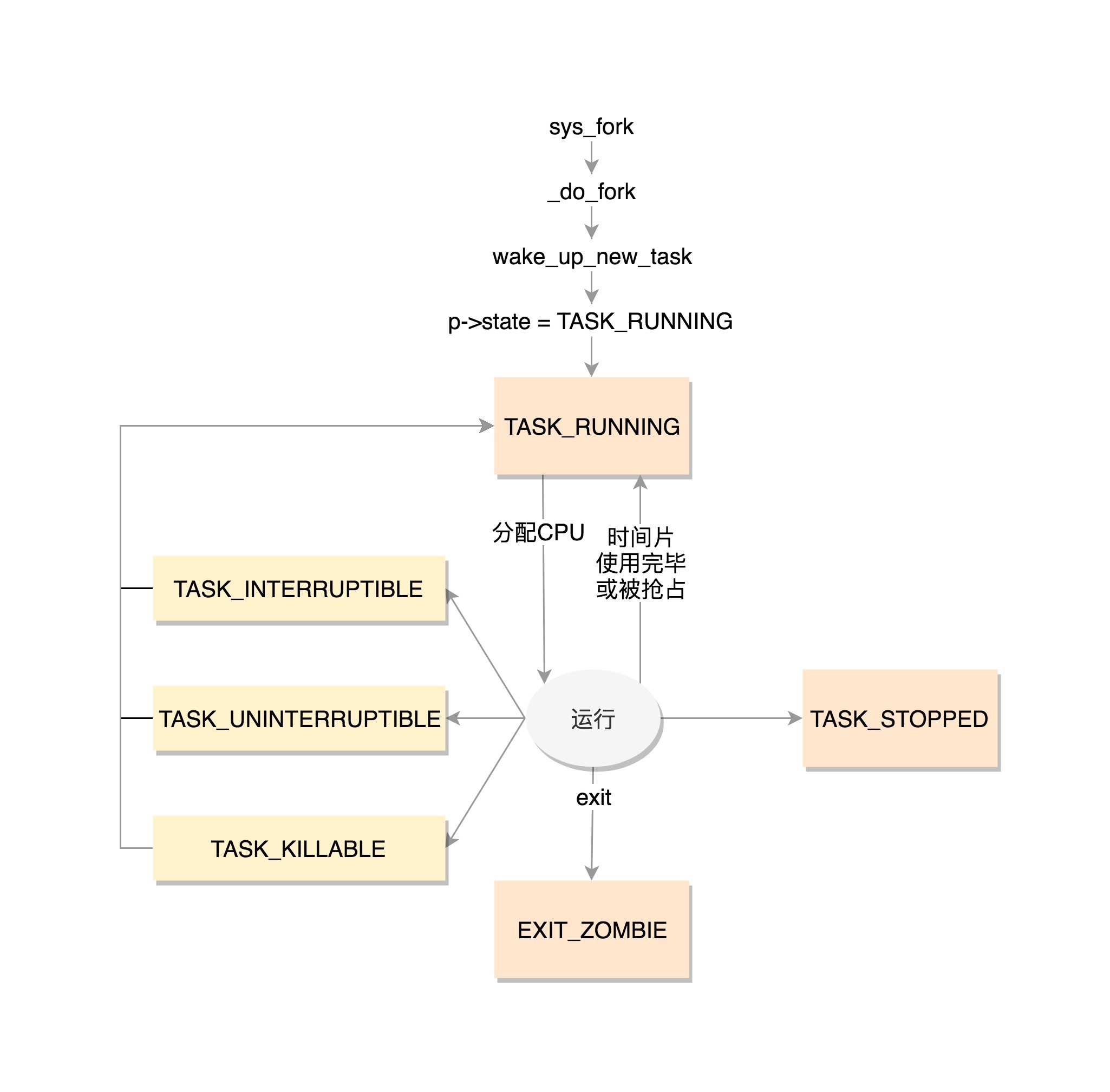
TASK_RUNNING并不是说进程正在运行,而是表示进程在时刻准备运行的状态。当处于这个状态的进程获得时间片的时候,就是在运行中;如果没有获得时间片,就说明它被其他进程抢占了,在等待再次分配时间片。
在运行中的进程,一旦要进行一些I/O操作,需要等待I/O完毕,这个时候会释放CPU,进入睡眠状态。
在Linux中,有两种睡眠状态。
一种是TASK_INTERRUPTIBLE,可中断的睡眠状态。这是一种浅睡眠的状态,也就是说,虽然在睡眠,等待I/O完成,但是这个时候一个信号来的时候,进程还是要被唤醒。只不过唤醒后,不是继续刚才的操作,而是进行信号处理。当然程序员可以根据自己的意愿,来写信号处理函数,例如收到某些信号,就放弃等待这个I/O操作完成,直接退出;或者收到某些信息,继续等待。
另一种睡眠是TASK_UNINTERRUPTIBLE,不可中断的睡眠状态。这是一种深度睡眠状态,不可被信号唤醒,只能死等I/O操作完成。一旦I/O操作因为特殊原因不能完成,这个时候,谁也叫不醒这个进程了。你可能会说,我kill它呢?别忘了,kill本身也是一个信号,既然这个状态不可被信号唤醒,kill信号也被忽略了。除非重启电脑,没有其他办法。
因此,这其实是一个比较危险的事情,除非程序员极其有把握,不然还是不要设置成TASK_UNINTERRUPTIBLE。
于是,我们就有了一种新的进程睡眠状态,TASK_KILLABLE,可以终止的新睡眠状态。进程处于这种状态中,它的运行原理类似TASK_UNINTERRUPTIBLE,只不过可以响应致命信号。
从定义可以看出,TASK_WAKEKILL用于在接收到致命信号时唤醒进程,而TASK_KILLABLE相当于这两位都设置了。
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
TASK_STOPPED是在进程接收到SIGSTOP、SIGTTIN、SIGTSTP或者SIGTTOU信号之后进入该状态。
TASK_TRACED表示进程被debugger等进程监视,进程执行被调试程序所停止。当一个进程被另外的进程所监视,每一个信号都会让进程进入该状态。
一旦一个进程要结束,先进入的是EXIT_ZOMBIE状态,但是这个时候它的父进程还没有使用wait()等系统调用来获知它的终止信息,此时进程就成了僵尸进程。
EXIT_DEAD是进程的最终状态。
EXIT_ZOMBIE和EXIT_DEAD也可以用于exit_state。
上面的进程状态和进程的运行、调度有关系,还有其他的一些状态,我们称为标志。放在flags字段中,这些字段都被定义成为宏,以PF开头。我这里举几个例子。
#define PF_EXITING 0x00000004
#define PF_VCPU 0x00000010
#define PF_FORKNOEXEC 0x00000040
PF_EXITING表示正在退出。当有这个flag的时候,在函数find_alive_thread中,找活着的线程,遇到有这个flag的,就直接跳过。
PF_VCPU表示进程运行在虚拟CPU上。在函数account_system_time中,统计进程的系统运行时间,如果有这个flag,就调用account_guest_time,按照客户机的时间进行统计。
PF_FORKNOEXEC表示fork完了,还没有exec。在_do_fork函数里面调用copy_process,这个时候把flag设置为PF_FORKNOEXEC。当exec中调用了load_elf_binary的时候,又把这个flag去掉。
进程的状态切换往往涉及调度,下面这些字段都是用于调度的。为了让你理解task_struct进程管理的全貌,我先在这里列一下,咱们后面会有单独的章节讲解,这里你只要大概看一下里面的注释就好了。
//是否在运行队列上
int on_rq;
//优先级
int prio;
int static_prio;
int normal_prio;
unsigned int rt_priority;
//调度器类
const struct sched_class *sched_class;
//调度实体
struct sched_entity se;
struct sched_rt_entity rt;
struct sched_dl_entity dl;
//调度策略
unsigned int policy;
//可以使用哪些CPU
int nr_cpus_allowed;
cpumask_t cpus_allowed;
struct sched_info sched_info;
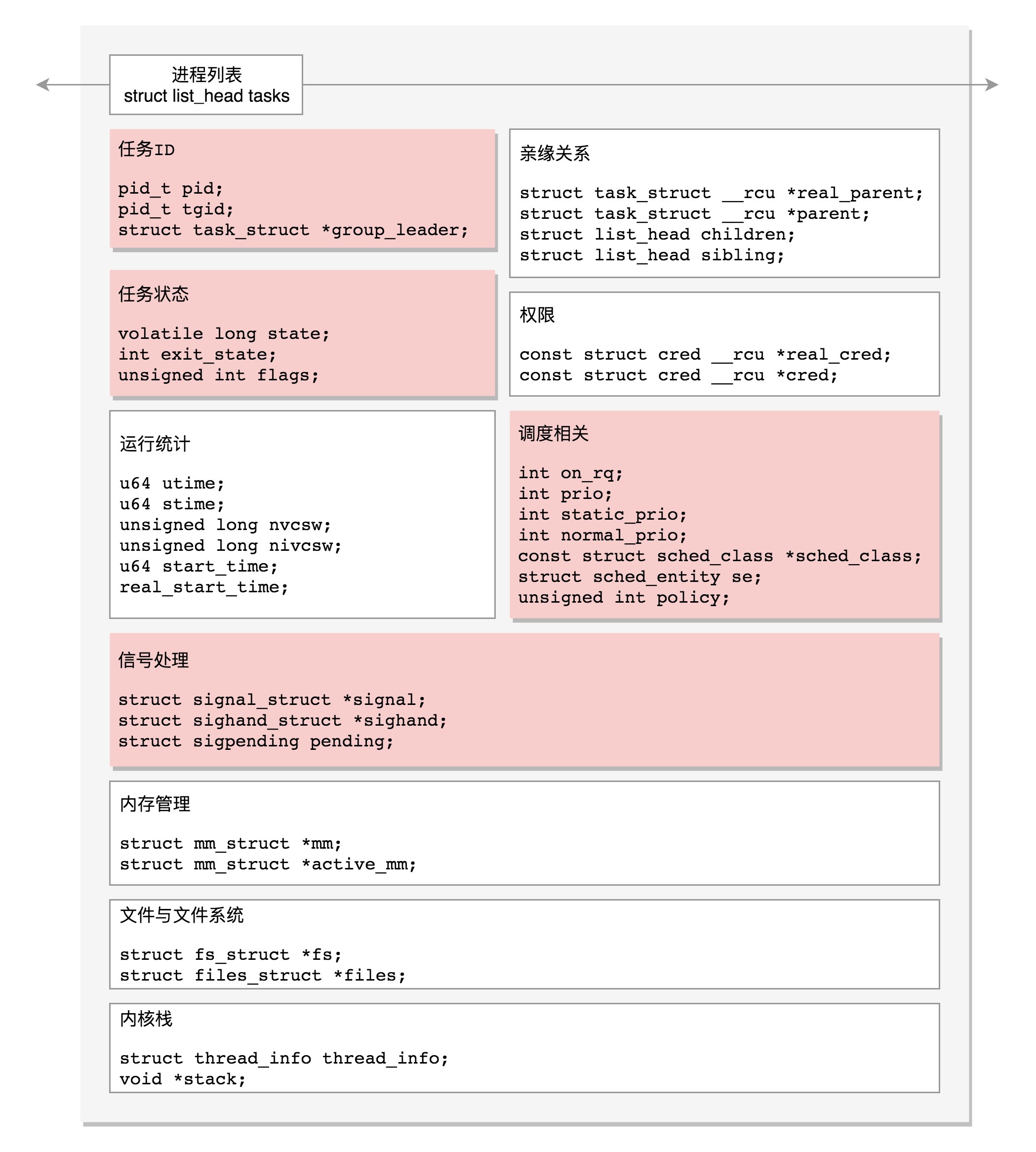
这一节,我们讲述了进程管理复杂的数据结构,我还是画一个图总结一下。这个图是进程管理task_struct的结构图。其中红色的部分是今天讲的部分,你可以对着这张图说出它们的含义。
这一节我们讲了任务的状态,你可以试着在代码里面搜索一下这些状态改变的地方是哪个函数,是什么时机,从而进一步理解任务的概念。
欢迎留言和我分享你的疑惑和见解,也欢迎你收藏本节内容,反复研读。你也可以把今天的内容分享给你的朋友,和他一起学习、进步。

评论