上一节,我们讲了输入输出设备的层次模型,还是比较复杂的,块设备尤其复杂。这一节为了让你更清晰地了解设备驱动程序的架构,我们先来讲稍微简单一点的字符设备驱动。
这一节,我找了两个比较简单的字符设备驱动来解析一下。一个是输入字符设备,鼠标。代码在drivers/input/mouse/logibm.c这里。
/*
* Logitech Bus Mouse Driver for Linux
*/
module_init(logibm_init);
module_exit(logibm_exit);
另外一个是输出字符设备,打印机,代码drivers/char/lp.c这里。
/*
* Generic parallel printer driver
*/
module_init(lp_init_module);
module_exit(lp_cleanup_module);
上一节,我们讲过,设备驱动程序是一个内核模块,以ko的文件形式存在,可以通过insmod加载到内核中。那我们首先来看一下,怎么样才能构建一个内核模块呢?
一个内核模块应该由以下几部分组成。
第一部分,头文件部分。一般的内核模块,都需要include下面两个头文件:
#include <linux/module.h>
#include <linux/init.h>
如果你去看上面两个驱动程序,都能找到这两个头文件。当然如果需要的话,我们还可以引入更多的头文件。
第二部分,定义一些函数,用于处理内核模块的主要逻辑。例如打开、关闭、读取、写入设备的函数或者响应中断的函数。
例如,logibm.c里面就定义了logibm_open。logibm_close就是处理打开和关闭的,定义了logibm_interrupt就是用来响应中断的。再如,lp.c里面就定义了lp_read,lp_write就是处理读写的。
第三部分,定义一个file_operations结构。前面我们讲过,设备是可以通过文件系统的接口进行访问的。咱们讲文件系统的时候说过,对于某种文件系统的操作,都是放在file_operations里面的。例如ext4就定义了这么一个结构,里面都是ext4_xxx之类的函数。设备要想被文件系统的接口操作,也需要定义这样一个结构。
例如,lp.c里面就定义了这样一个结构。
static const struct file_operations lp_fops = {
.owner = THIS_MODULE,
.write = lp_write,
.unlocked_ioctl = lp_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = lp_compat_ioctl,
#endif
.open = lp_open,
.release = lp_release,
#ifdef CONFIG_PARPORT_1284
.read = lp_read,
#endif
.llseek = noop_llseek,
};
在logibm.c里面,我们找不到这样的结构,是因为它属于众多输入设备的一种,而输入设备的操作被统一定义在drivers/input/input.c里面,logibm.c只是定义了一些自己独有的操作。
static const struct file_operations input_devices_fileops = {
.owner = THIS_MODULE,
.open = input_proc_devices_open,
.poll = input_proc_devices_poll,
.read = seq_read,
.llseek = seq_lseek,
.release = seq_release,
};
第四部分,定义整个模块的初始化函数和退出函数,用于加载和卸载这个ko的时候调用。
例如lp.c就定义了lp_init_module和lp_cleanup_module,logibm.c就定义了logibm_init和logibm_exit。
第五部分,调用module_init和module_exit,分别指向上面两个初始化函数和退出函数。就像本节最开头展示的一样。
第六部分,声明一下lisense,调用MODULE_LICENSE。
有了这六部分,一个内核模块就基本合格了,可以工作了。
字符设备可不是一个普通的内核模块,它有自己独特的行为。接下来,我们就沿着打开一个字符设备的过程,看看字符设备这个内核模块做了哪些特殊的事情。
要使用一个字符设备,我们首先要把写好的内核模块,通过insmod加载进内核。这个时候,先调用的就是module_init调用的初始化函数。
例如,在lp.c的初始化函数lp_init对应的代码如下:
static int __init lp_init (void)
{
......
if (register_chrdev (LP_MAJOR, "lp", &lp_fops)) {
printk (KERN_ERR "lp: unable to get major %d\n", LP_MAJOR);
return -EIO;
}
......
}
int __register_chrdev(unsigned int major, unsigned int baseminor,
unsigned int count, const char *name,
const struct file_operations *fops)
{
struct char_device_struct *cd;
struct cdev *cdev;
int err = -ENOMEM;
......
cd = __register_chrdev_region(major, baseminor, count, name);
cdev = cdev_alloc();
cdev->owner = fops->owner;
cdev->ops = fops;
kobject_set_name(&cdev->kobj, "%s", name);
err = cdev_add(cdev, MKDEV(cd->major, baseminor), count);
cd->cdev = cdev;
return major ? 0 : cd->major;
}
在字符设备驱动的内核模块加载的时候,最重要的一件事情就是,注册这个字符设备。注册的方式是调用__register_chrdev_region,注册字符设备的主次设备号和名称,然后分配一个struct cdev结构,将cdev的ops成员变量指向这个模块声明的file_operations。然后,cdev_add会将这个字符设备添加到内核中一个叫作struct kobj_map *cdev_map的结构,来统一管理所有字符设备。
其中,MKDEV(cd->major, baseminor)表示将主设备号和次设备号生成一个dev_t的整数,然后将这个整数dev_t和cdev关联起来。
/**
* cdev_add() - add a char device to the system
* @p: the cdev structure for the device
* @dev: the first device number for which this device is responsible
* @count: the number of consecutive minor numbers corresponding to this
* device
*
* cdev_add() adds the device represented by @p to the system, making it
* live immediately. A negative error code is returned on failure.
*/
int cdev_add(struct cdev *p, dev_t dev, unsigned count)
{
int error;
p->dev = dev;
p->count = count;
error = kobj_map(cdev_map, dev, count, NULL,
exact_match, exact_lock, p);
kobject_get(p->kobj.parent);
return 0;
在logibm.c中,我们在logibm_init找不到注册字符设备,这是因为input.c里面的初始化函数input_init会调用register_chrdev_region,注册输入的字符设备,会在logibm_init中调用input_register_device,将logibm.c这个字符设备注册到input.c里面去,这就相当于input.c对多个输入字符设备进行统一的管理。
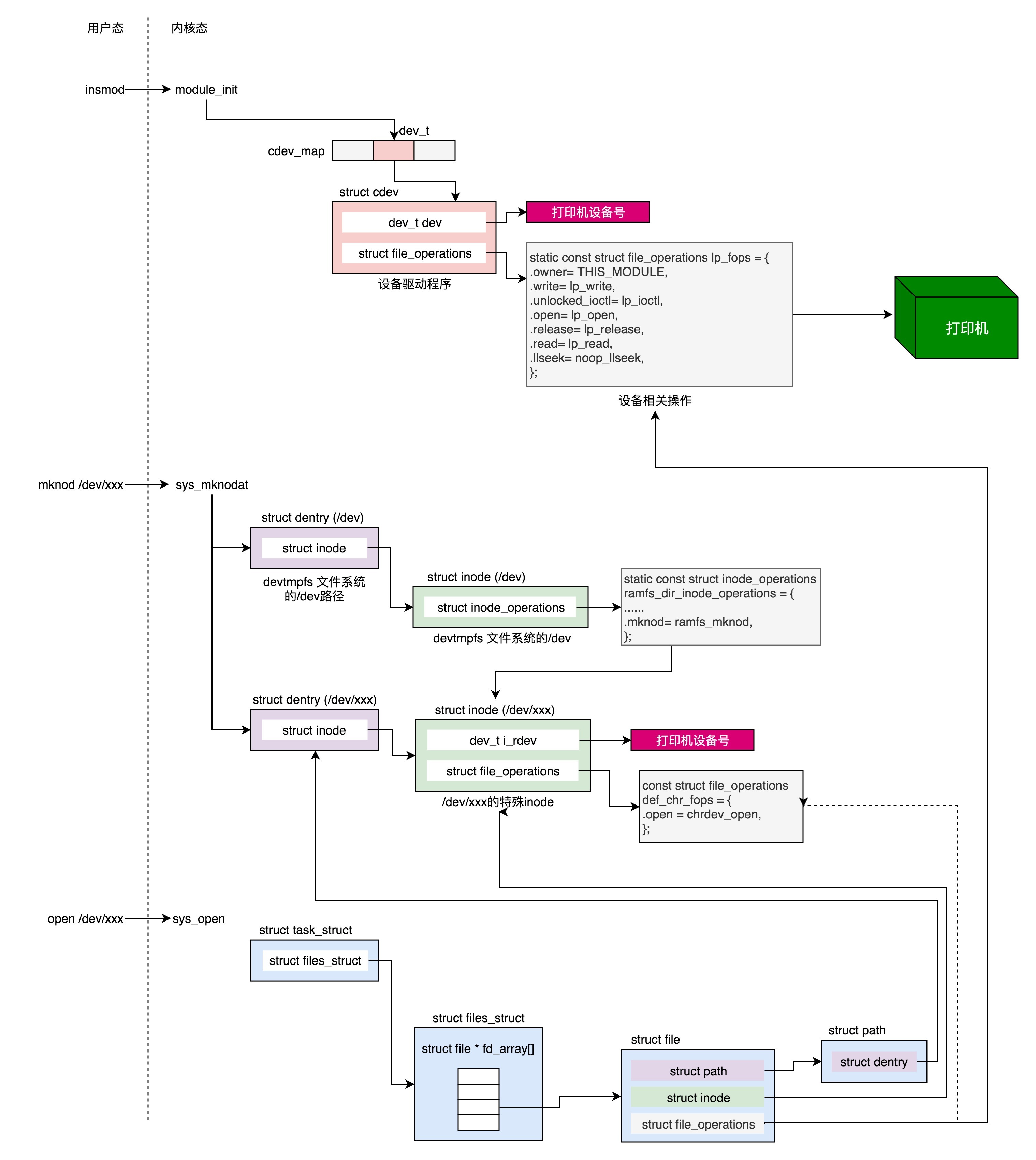
内核模块加载完毕后,接下来要通过mknod在/dev下面创建一个设备文件,只有有了这个设备文件,我们才能通过文件系统的接口,对这个设备文件进行操作。
mknod也是一个系统调用,定义如下:
SYSCALL_DEFINE3(mknod, const char __user *, filename, umode_t, mode, unsigned, dev)
{
return sys_mknodat(AT_FDCWD, filename, mode, dev);
}
SYSCALL_DEFINE4(mknodat, int, dfd, const char __user *, filename, umode_t, mode,
unsigned, dev)
{
struct dentry *dentry;
struct path path;
......
dentry = user_path_create(dfd, filename, &path, lookup_flags);
......
switch (mode & S_IFMT) {
......
case S_IFCHR: case S_IFBLK:
error = vfs_mknod(path.dentry->d_inode,dentry,mode,
new_decode_dev(dev));
break;
......
}
}
我们可以在这个系统调用里看到,在文件系统上,顺着路径找到/dev/xxx所在的文件夹,然后为这个新创建的设备文件创建一个dentry。这是维护文件和inode之间的关联关系的结构。
接下来,如果是字符文件S_IFCHR或者设备文件S_IFBLK,我们就调用vfs_mknod。
int vfs_mknod(struct inode *dir, struct dentry *dentry, umode_t mode, dev_t dev)
{
......
error = dir->i_op->mknod(dir, dentry, mode, dev);
......
}
这里需要调用对应的文件系统的inode_operations。应该调用哪个文件系统呢?
如果我们在linux下面执行mount命令,能看到下面这一行:
devtmpfs on /dev type devtmpfs (rw,nosuid,size=3989584k,nr_inodes=997396,mode=755)
也就是说,/dev下面的文件系统的名称为devtmpfs,我们可以在内核中找到它。
static struct dentry *dev_mount(struct file_system_type *fs_type, int flags,
const char *dev_name, void *data)
{
#ifdef CONFIG_TMPFS
return mount_single(fs_type, flags, data, shmem_fill_super);
#else
return mount_single(fs_type, flags, data, ramfs_fill_super);
#endif
}
static struct file_system_type dev_fs_type = {
.name = "devtmpfs",
.mount = dev_mount,
.kill_sb = kill_litter_super,
};
从这里可以看出,devtmpfs在挂载的时候,有两种模式,一种是ramfs,一种是shmem都是基于内存的文件系统。这里你先不用管,基于内存的文件系统具体是怎么回事儿。
static const struct inode_operations ramfs_dir_inode_operations = {
......
.mknod = ramfs_mknod,
};
static const struct inode_operations shmem_dir_inode_operations = {
#ifdef CONFIG_TMPFS
......
.mknod = shmem_mknod,
};
这两个mknod虽然实现不同,但是都会调用到同一个函数init_special_inode。
void init_special_inode(struct inode *inode, umode_t mode, dev_t rdev)
{
inode->i_mode = mode;
if (S_ISCHR(mode)) {
inode->i_fop = &def_chr_fops;
inode->i_rdev = rdev;
} else if (S_ISBLK(mode)) {
inode->i_fop = &def_blk_fops;
inode->i_rdev = rdev;
} else if (S_ISFIFO(mode))
inode->i_fop = &pipefifo_fops;
else if (S_ISSOCK(mode))
; /* leave it no_open_fops */
}
显然这个文件是个特殊文件,inode也是特殊的。这里这个inode可以关联字符设备、块设备、FIFO文件、Socket等。我们这里只看字符设备。
这里的inode的file_operations指向一个def_chr_fops,这里面只有一个open,就等着你打开它。
另外,inode的i_rdev指向这个设备的dev_t。还记得cdev_map吗?通过这个dev_t,可以找到我们刚在加载的字符设备cdev。
const struct file_operations def_chr_fops = {
.open = chrdev_open,
};
到目前为止,我们只是创建了/dev下面的一个文件,并且和相应的设备号关联起来。但是,我们还没有打开这个/dev下面的设备文件。
现在我们来打开它。打开一个文件的流程,我们在文件系统那一节讲过了,这里不再重复。最终就像打开字符设备的图中一样,打开文件的进程的task_struct里,有一个数组代表它打开的文件,下标就是文件描述符fd,每一个打开的文件都有一个struct file结构,会指向一个dentry项。dentry可以用来关联inode。这个dentry就是咱们上面mknod的时候创建的。
在进程里面调用open函数,最终会调用到这个特殊的inode的open函数,也就是chrdev_open。
static int chrdev_open(struct inode *inode, struct file *filp)
{
const struct file_operations *fops;
struct cdev *p;
struct cdev *new = NULL;
int ret = 0;
p = inode->i_cdev;
if (!p) {
struct kobject *kobj;
int idx;
kobj = kobj_lookup(cdev_map, inode->i_rdev, &idx);
new = container_of(kobj, struct cdev, kobj);
p = inode->i_cdev;
if (!p) {
inode->i_cdev = p = new;
list_add(&inode->i_devices, &p->list);
new = NULL;
}
}
......
fops = fops_get(p->ops);
......
replace_fops(filp, fops);
if (filp->f_op->open) {
ret = filp->f_op->open(inode, filp);
......
}
......
}
在这个函数里面,我们首先看这个inode的i_cdev,是否已经关联到cdev。如果第一次打开,当然没有。没有没关系,inode里面有i_rdev呀,也就是有dev_t。我们可以通过它在cdev_map中找cdev。咱们上面注册过了,所以肯定能够找到。找到后我们就将inode的i_cdev,关联到找到的cdev new。
找到cdev就好办了。cdev里面有file_operations,这是设备驱动程序自己定义的。我们可以通过它来操作设备驱动程序,把它付给struct file里面的file_operations。这样以后操作文件描述符,就是直接操作设备了。
最后,我们需要调用设备驱动程序的file_operations的open函数,真正打开设备。对于打印机,调用的是lp_open。对于鼠标调用的是input_proc_devices_open,最终会调用到logibm_open。这些多和设备相关,你不必看懂它们。
当我们像打开一个文件一样打开一个字符设备之后,接下来就是对这个设备的读写。对于文件的读写咱们在文件系统那一章详细讲述过,读写的过程是类似的,所以这里我们只解析打印机驱动写入的过程。
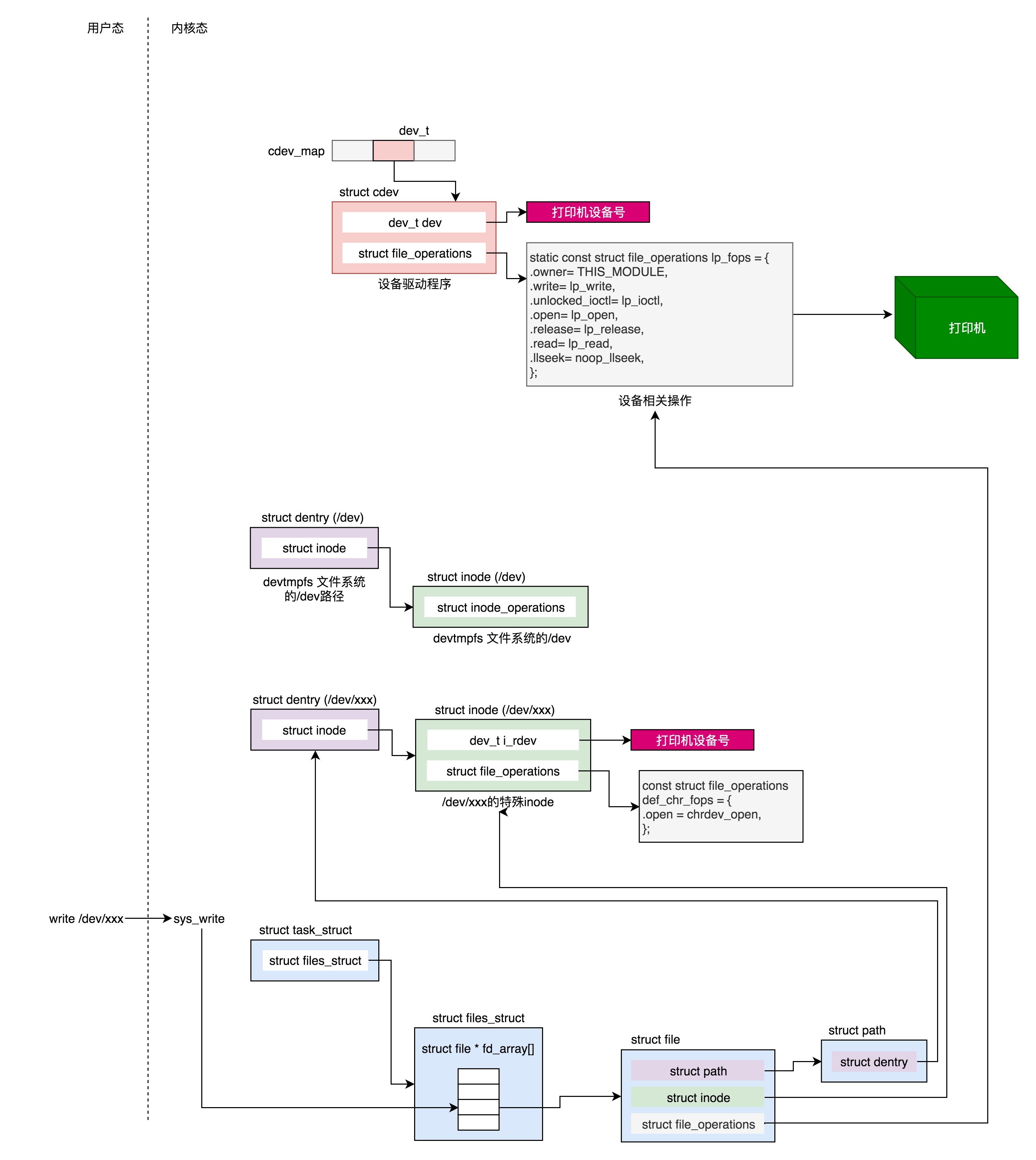
写入一个字符设备,就是用文件系统的标准接口write,参数文件描述符fd,在内核里面调用的sys_write,在sys_write里面根据文件描述符fd得到struct file结构。接下来再调用vfs_write。
ssize_t __vfs_write(struct file *file, const char __user *p, size_t count, loff_t *pos)
{
if (file->f_op->write)
return file->f_op->write(file, p, count, pos);
else if (file->f_op->write_iter)
return new_sync_write(file, p, count, pos);
else
return -EINVAL;
}
我们可以看到,在__vfs_write里面,我们会调用struct file结构里的file_operations的write函数。上面我们打开字符设备的时候,已经将struct file结构里面的file_operations指向了设备驱动程序的file_operations结构,所以这里的write函数最终会调用到lp_write。
static ssize_t lp_write(struct file * file, const char __user * buf,
size_t count, loff_t *ppos)
{
unsigned int minor = iminor(file_inode(file));
struct parport *port = lp_table[minor].dev->port;
char *kbuf = lp_table[minor].lp_buffer;
ssize_t retv = 0;
ssize_t written;
size_t copy_size = count;
......
/* Need to copy the data from user-space. */
if (copy_size > LP_BUFFER_SIZE)
copy_size = LP_BUFFER_SIZE;
......
if (copy_from_user (kbuf, buf, copy_size)) {
retv = -EFAULT;
goto out_unlock;
}
......
do {
/* Write the data. */
written = parport_write (port, kbuf, copy_size);
if (written > 0) {
copy_size -= written;
count -= written;
buf += written;
retv += written;
}
......
if (need_resched())
schedule ();
if (count) {
copy_size = count;
if (copy_size > LP_BUFFER_SIZE)
copy_size = LP_BUFFER_SIZE;
if (copy_from_user(kbuf, buf, copy_size)) {
if (retv == 0)
retv = -EFAULT;
break;
}
}
} while (count > 0);
......
这个设备驱动程序的写入函数的实现还是比较典型的。先是调用copy_from_user将数据从用户态拷贝到内核态的缓存中,然后调用parport_write写入外部设备。这里还有一个schedule函数,也即写入的过程中,给其他线程抢占CPU的机会。然后,如果count还是大于0,也就是数据还没有写完,那我们就接着copy_from_user,接着parport_write,直到写完为止。
对于I/O设备来讲,我们前面也说过,除了读写设备,还会调用ioctl,做一些特殊的I/O操作。
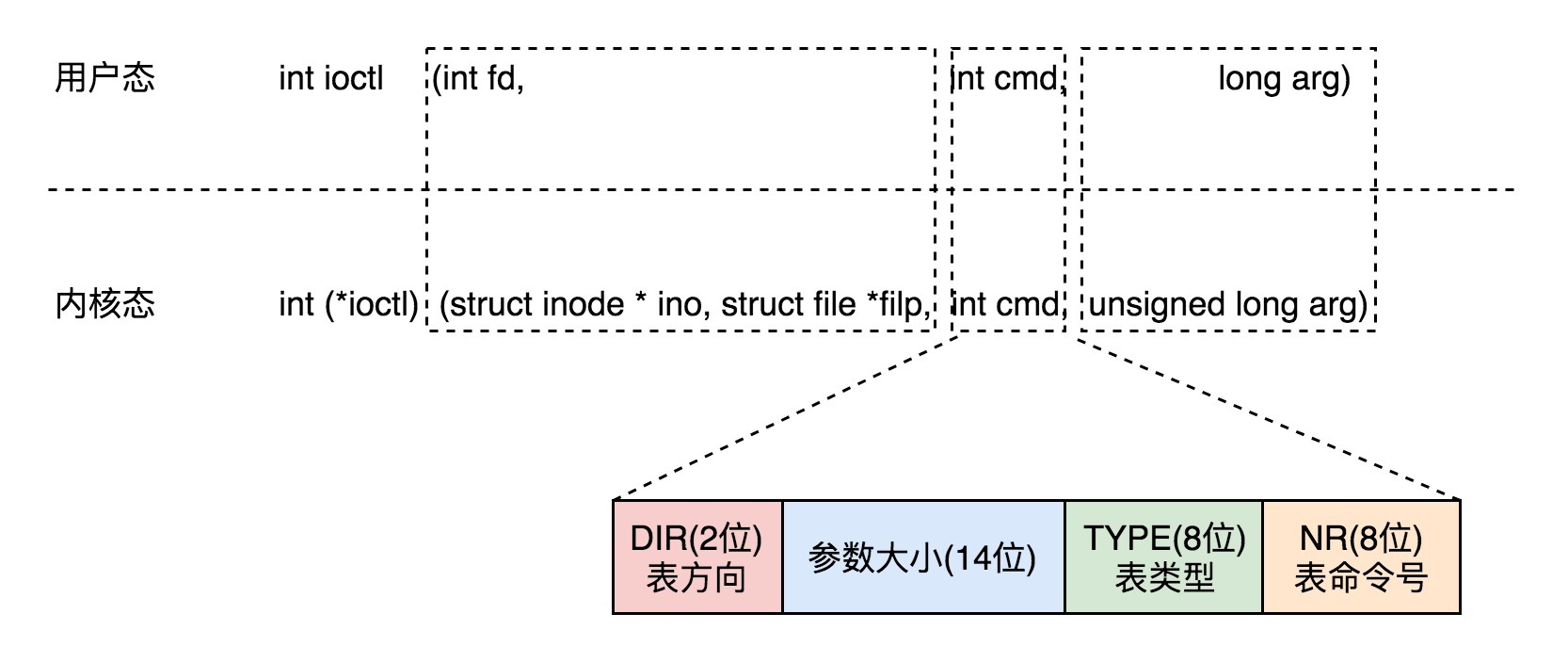
ioctl也是一个系统调用,它在内核里面的定义如下:
SYSCALL_DEFINE3(ioctl, unsigned int, fd, unsigned int, cmd, unsigned long, arg)
{
int error;
struct fd f = fdget(fd);
......
error = do_vfs_ioctl(f.file, fd, cmd, arg);
fdput(f);
return error;
}
其中,fd是这个设备的文件描述符,cmd是传给这个设备的命令,arg是命令的参数。其中,对于命令和命令的参数,使用ioctl系统调用的用户和驱动程序的开发人员约定好行为即可。
其实cmd看起来是一个int,其实他的组成比较复杂,它由几部分组成:
由于组成比较复杂,有一些宏是专门用于组成这个cmd值的。
/*
* Used to create numbers.
*/
#define _IO(type,nr) _IOC(_IOC_NONE,(type),(nr),0)
#define _IOR(type,nr,size) _IOC(_IOC_READ,(type),(nr),(_IOC_TYPECHECK(size)))
#define _IOW(type,nr,size) _IOC(_IOC_WRITE,(type),(nr),(_IOC_TYPECHECK(size)))
#define _IOWR(type,nr,size) _IOC(_IOC_READ|_IOC_WRITE,(type),(nr),(_IOC_TYPECHECK(size)))
/* used to decode ioctl numbers.. */
#define _IOC_DIR(nr) (((nr) >> _IOC_DIRSHIFT) & _IOC_DIRMASK)
#define _IOC_TYPE(nr) (((nr) >> _IOC_TYPESHIFT) & _IOC_TYPEMASK)
#define _IOC_NR(nr) (((nr) >> _IOC_NRSHIFT) & _IOC_NRMASK)
#define _IOC_SIZE(nr) (((nr) >> _IOC_SIZESHIFT) & _IOC_SIZEMASK)
在用户程序中,可以通过上面的“Used to create numbers”这些宏,根据参数生成cmd,在驱动程序中,可以通过下面的“used to decode ioctl numbers”这些宏,解析cmd后,执行指令。
ioctl中会调用do_vfs_ioctl,这里面对于已经定义好的cmd,进行相应的处理。如果不是默认定义好的cmd,则执行默认操作。对于普通文件,调用file_ioctl;对于其他文件调用vfs_ioctl。
int do_vfs_ioctl(struct file *filp, unsigned int fd, unsigned int cmd,
unsigned long arg)
{
int error = 0;
int __user *argp = (int __user *)arg;
struct inode *inode = file_inode(filp);
switch (cmd) {
......
case FIONBIO:
error = ioctl_fionbio(filp, argp);
break;
case FIOASYNC:
error = ioctl_fioasync(fd, filp, argp);
break;
......
case FICLONE:
return ioctl_file_clone(filp, arg, 0, 0, 0);
default:
if (S_ISREG(inode->i_mode))
error = file_ioctl(filp, cmd, arg);
else
error = vfs_ioctl(filp, cmd, arg);
break;
}
return error;
由于咱们这里是设备驱动程序,所以调用的是vfs_ioctl。
/**
* vfs_ioctl - call filesystem specific ioctl methods
* @filp: open file to invoke ioctl method on
* @cmd: ioctl command to execute
* @arg: command-specific argument for ioctl
*
* Invokes filesystem specific ->unlocked_ioctl, if one exists; otherwise
* returns -ENOTTY.
*
* Returns 0 on success, -errno on error.
*/
long vfs_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int error = -ENOTTY;
if (!filp->f_op->unlocked_ioctl)
goto out;
error = filp->f_op->unlocked_ioctl(filp, cmd, arg);
if (error == -ENOIOCTLCMD)
error = -ENOTTY;
out:
return error;
这里面调用的是struct file里file_operations的unlocked_ioctl函数。我们前面初始化设备驱动的时候,已经将file_operations指向设备驱动的file_operations了。这里调用的是设备驱动的unlocked_ioctl。对于打印机程序来讲,调用的是lp_ioctl。可以看出来,这里面就是switch语句,它会根据不同的cmd,做不同的操作。
static long lp_ioctl(struct file *file, unsigned int cmd,
unsigned long arg)
{
unsigned int minor;
struct timeval par_timeout;
int ret;
minor = iminor(file_inode(file));
mutex_lock(&lp_mutex);
switch (cmd) {
......
default:
ret = lp_do_ioctl(minor, cmd, arg, (void __user *)arg);
break;
}
mutex_unlock(&lp_mutex);
return ret;
}
static int lp_do_ioctl(unsigned int minor, unsigned int cmd,
unsigned long arg, void __user *argp)
{
int status;
int retval = 0;
switch ( cmd ) {
case LPTIME:
if (arg > UINT_MAX / HZ)
return -EINVAL;
LP_TIME(minor) = arg * HZ/100;
break;
case LPCHAR:
LP_CHAR(minor) = arg;
break;
case LPABORT:
if (arg)
LP_F(minor) |= LP_ABORT;
else
LP_F(minor) &= ~LP_ABORT;
break;
case LPABORTOPEN:
if (arg)
LP_F(minor) |= LP_ABORTOPEN;
else
LP_F(minor) &= ~LP_ABORTOPEN;
break;
case LPCAREFUL:
if (arg)
LP_F(minor) |= LP_CAREFUL;
else
LP_F(minor) &= ~LP_CAREFUL;
break;
case LPWAIT:
LP_WAIT(minor) = arg;
break;
case LPSETIRQ:
return -EINVAL;
break;
case LPGETIRQ:
if (copy_to_user(argp, &LP_IRQ(minor),
sizeof(int)))
return -EFAULT;
break;
case LPGETSTATUS:
if (mutex_lock_interruptible(&lp_table[minor].port_mutex))
return -EINTR;
lp_claim_parport_or_block (&lp_table[minor]);
status = r_str(minor);
lp_release_parport (&lp_table[minor]);
mutex_unlock(&lp_table[minor].port_mutex);
if (copy_to_user(argp, &status, sizeof(int)))
return -EFAULT;
break;
case LPRESET:
lp_reset(minor);
break;
case LPGETFLAGS:
status = LP_F(minor);
if (copy_to_user(argp, &status, sizeof(int)))
return -EFAULT;
break;
default:
retval = -EINVAL;
}
return retval
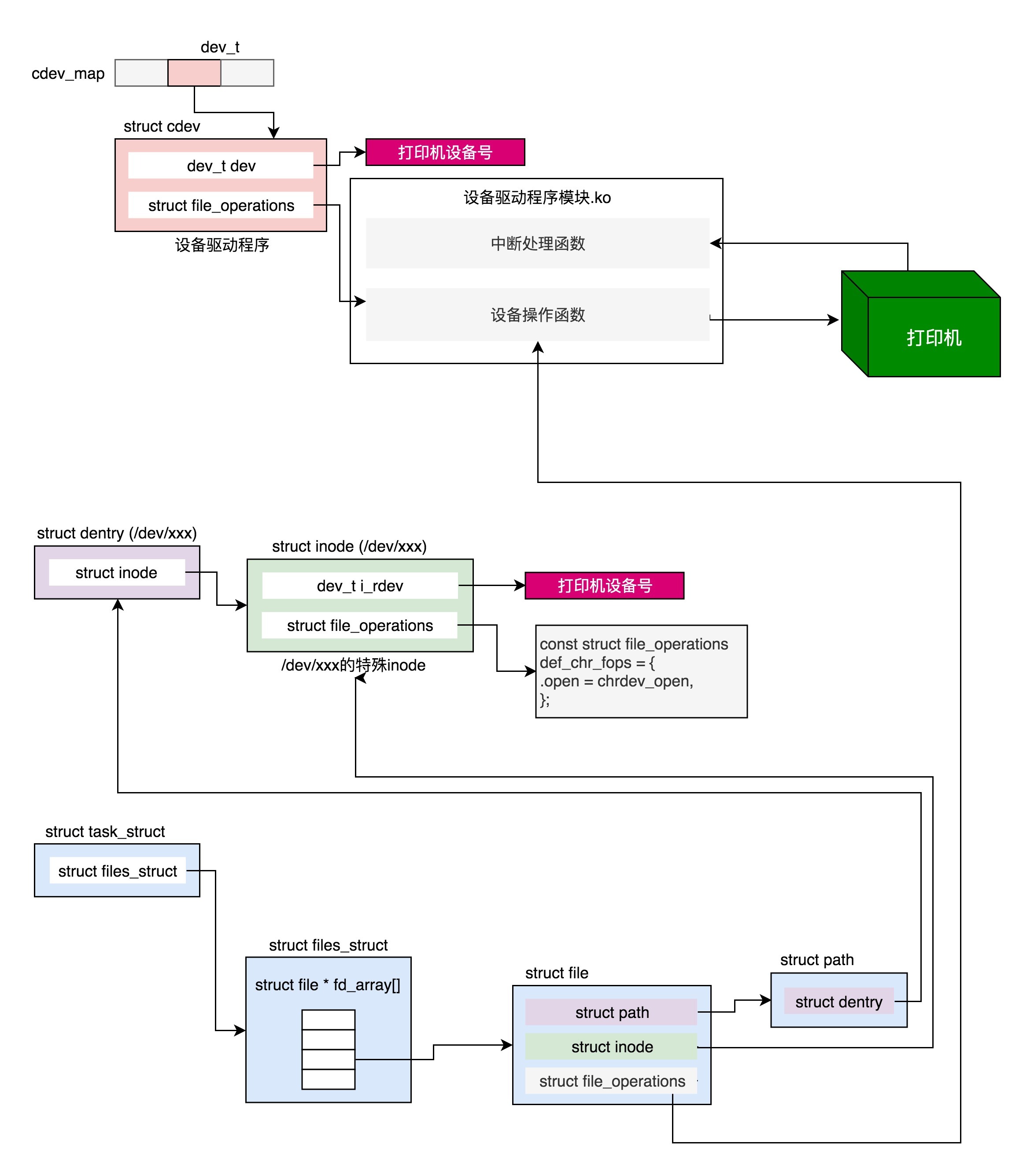
这一节我们讲了字符设备的打开、写入和ioctl等最常见的操作。一个字符设备要能够工作,需要三部分配合。
第一,有一个设备驱动程序的ko模块,里面有模块初始化函数、中断处理函数、设备操作函数。这里面封装了对于外部设备的操作。加载设备驱动程序模块的时候,模块初始化函数会被调用。在内核维护所有字符设备驱动的数据结构cdev_map里面注册,我们就可以很容易根据设备号,找到相应的设备驱动程序。
第二,在/dev目录下有一个文件表示这个设备,这个文件在特殊的devtmpfs文件系统上,因而也有相应的dentry和inode。这里的inode是一个特殊的inode,里面有设备号。通过它,我们可以在cdev_map中找到设备驱动程序,里面还有针对字符设备文件的默认操作def_chr_fops。
第三,打开一个字符设备文件和打开一个普通的文件有类似的数据结构,有文件描述符、有struct file、指向字符设备文件的dentry和inode。字符设备文件的相关操作file_operations一开始指向def_chr_fops,在调用def_chr_fops里面的chrdev_open函数的时候,修改为指向设备操作函数,从而读写一个字符设备文件就会直接变成读写外部设备了。
这节我用打印机驱动程序作为例子来给你讲解字符设备,请你仔细看一下它的代码,设想一下,如果让你自己写一个字符设备驱动程序,应该实现哪些函数呢?
欢迎留言和我分享你的疑惑和见解 ,也欢迎可以收藏本节内容,反复研读。你也可以把今天的内容分享给你的朋友,和他一起学习和进步。

评论