在上一篇文章中,我们讲到Java SDK并发包里的Lock有别于synchronized隐式锁的三个特性:能够响应中断、支持超时和非阻塞地获取锁。那今天我们接着再来详细聊聊Java SDK并发包里的Condition,Condition实现了管程模型里面的条件变量。
在《08 | 管程:并发编程的万能钥匙》里我们提到过Java 语言内置的管程里只有一个条件变量,而Lock&Condition实现的管程是支持多个条件变量的,这是二者的一个重要区别。
在很多并发场景下,支持多个条件变量能够让我们的并发程序可读性更好,实现起来也更容易。例如,实现一个阻塞队列,就需要两个条件变量。
那如何利用两个条件变量快速实现阻塞队列呢?
一个阻塞队列,需要两个条件变量,一个是队列不空(空队列不允许出队),另一个是队列不满(队列已满不允许入队),这个例子我们前面在介绍管程的时候详细说过,这里就不再赘述。相关的代码,我这里重新列了出来,你可以温故知新一下。
public class BlockedQueue<T>{
final Lock lock =
new ReentrantLock();
// 条件变量:队列不满
final Condition notFull =
lock.newCondition();
// 条件变量:队列不空
final Condition notEmpty =
lock.newCondition();
// 入队
void enq(T x) {
lock.lock();
try {
while (队列已满){
// 等待队列不满
notFull.await();
}
// 省略入队操作...
//入队后,通知可出队
notEmpty.signal();
}finally {
lock.unlock();
}
}
// 出队
void deq(){
lock.lock();
try {
while (队列已空){
// 等待队列不空
notEmpty.await();
}
// 省略出队操作...
//出队后,通知可入队
notFull.signal();
}finally {
lock.unlock();
}
}
}
不过,这里你需要注意,Lock和Condition实现的管程,线程等待和通知需要调用await()、signal()、signalAll(),它们的语义和wait()、notify()、notifyAll()是相同的。但是不一样的是,Lock&Condition实现的管程里只能使用前面的await()、signal()、signalAll(),而后面的wait()、notify()、notifyAll()只有在synchronized实现的管程里才能使用。如果一不小心在Lock&Condition实现的管程里调用了wait()、notify()、notifyAll(),那程序可就彻底玩儿完了。
Java SDK并发包里的Lock和Condition不过就是管程的一种实现而已,管程你已经很熟悉了,那Lock和Condition的使用自然是小菜一碟。下面我们就来看看在知名项目Dubbo中,Lock和Condition是怎么用的。不过在开始介绍源码之前,我还先要介绍两个概念:同步和异步。
我们平时写的代码,基本都是同步的。但最近几年,异步编程大火。那同步和异步的区别到底是什么呢?通俗点来讲就是调用方是否需要等待结果,如果需要等待结果,就是同步;如果不需要等待结果,就是异步。
比如在下面的代码里,有一个计算圆周率小数点后100万位的方法pai1M(),这个方法可能需要执行俩礼拜,如果调用pai1M()之后,线程一直等着计算结果,等俩礼拜之后结果返回,就可以执行 printf("hello world")了,这个属于同步;如果调用pai1M()之后,线程不用等待计算结果,立刻就可以执行 printf("hello world"),这个就属于异步。
// 计算圆周率小说点后100万位
String pai1M() {
//省略代码无数
}
pai1M()
printf("hello world")
同步,是Java代码默认的处理方式。如果你想让你的程序支持异步,可以通过下面两种方式来实现:
其实在编程领域,异步的场景还是挺多的,比如TCP协议本身就是异步的,我们工作中经常用到的RPC调用,在TCP协议层面,发送完RPC请求后,线程是不会等待RPC的响应结果的。可能你会觉得奇怪,平时工作中的RPC调用大多数都是同步的啊?这是怎么回事呢?
其实很简单,一定是有人帮你做了异步转同步的事情。例如目前知名的RPC框架Dubbo就给我们做了异步转同步的事情,那它是怎么做的呢?下面我们就来分析一下Dubbo的相关源码。
对于下面一个简单的RPC调用,默认情况下sayHello()方法,是个同步方法,也就是说,执行service.sayHello(“dubbo”)的时候,线程会停下来等结果。
DemoService service = 初始化部分省略
String message =
service.sayHello("dubbo");
System.out.println(message);
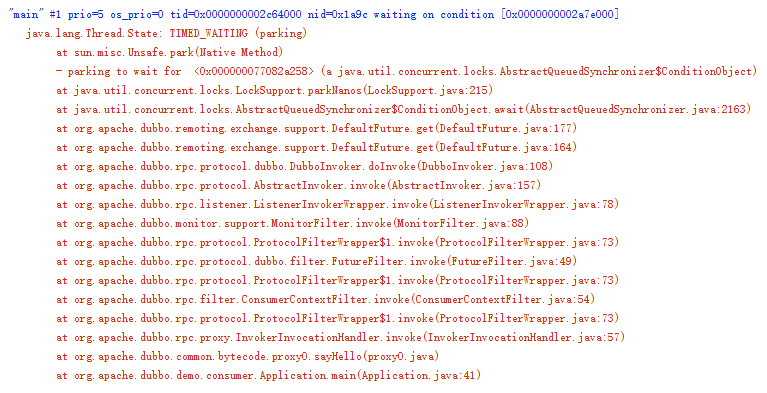
如果此时你将调用线程dump出来的话,会是下图这个样子,你会发现调用线程阻塞了,线程状态是TIMED_WAITING。本来发送请求是异步的,但是调用线程却阻塞了,说明Dubbo帮我们做了异步转同步的事情。通过调用栈,你能看到线程是阻塞在DefaultFuture.get()方法上,所以可以推断:Dubbo异步转同步的功能应该是通过DefaultFuture这个类实现的。
不过为了理清前后关系,还是有必要分析一下调用DefaultFuture.get()之前发生了什么。DubboInvoker的108行调用了DefaultFuture.get(),这一行很关键,我稍微修改了一下列在了下面。这一行先调用了request(inv, timeout)方法,这个方法其实就是发送RPC请求,之后通过调用get()方法等待RPC返回结果。
public class DubboInvoker{
Result doInvoke(Invocation inv){
// 下面这行就是源码中108行
// 为了便于展示,做了修改
return currentClient
.request(inv, timeout)
.get();
}
}
DefaultFuture这个类是很关键,我把相关的代码精简之后,列到了下面。不过在看代码之前,你还是有必要重复一下我们的需求:当RPC返回结果之前,阻塞调用线程,让调用线程等待;当RPC返回结果后,唤醒调用线程,让调用线程重新执行。不知道你有没有似曾相识的感觉,这不就是经典的等待-通知机制吗?这个时候想必你的脑海里应该能够浮现出管程的解决方案了。有了自己的方案之后,我们再来看看Dubbo是怎么实现的。
// 创建锁与条件变量
private final Lock lock
= new ReentrantLock();
private final Condition done
= lock.newCondition();
// 调用方通过该方法等待结果
Object get(int timeout){
long start = System.nanoTime();
lock.lock();
try {
while (!isDone()) {
done.await(timeout);
long cur=System.nanoTime();
if (isDone() ||
cur-start > timeout){
break;
}
}
} finally {
lock.unlock();
}
if (!isDone()) {
throw new TimeoutException();
}
return returnFromResponse();
}
// RPC结果是否已经返回
boolean isDone() {
return response != null;
}
// RPC结果返回时调用该方法
private void doReceived(Response res) {
lock.lock();
try {
response = res;
if (done != null) {
done.signal();
}
} finally {
lock.unlock();
}
}
调用线程通过调用get()方法等待RPC返回结果,这个方法里面,你看到的都是熟悉的“面孔”:调用lock()获取锁,在finally里面调用unlock()释放锁;获取锁后,通过经典的在循环中调用await()方法来实现等待。
当RPC结果返回时,会调用doReceived()方法,这个方法里面,调用lock()获取锁,在finally里面调用unlock()释放锁,获取锁后通过调用signal()来通知调用线程,结果已经返回,不用继续等待了。
至此,Dubbo里面的异步转同步的源码就分析完了,有没有觉得还挺简单的?最近这几年,工作中需要异步处理的越来越多了,其中有一个主要原因就是有些API本身就是异步API。例如websocket也是一个异步的通信协议,如果基于这个协议实现一个简单的RPC,你也会遇到异步转同步的问题。现在很多公有云的API本身也是异步的,例如创建云主机,就是一个异步的API,调用虽然成功了,但是云主机并没有创建成功,你需要调用另外一个API去轮询云主机的状态。如果你需要在项目内部封装创建云主机的API,你也会面临异步转同步的问题,因为同步的API更易用。
Lock&Condition是管程的一种实现,所以能否用好Lock和Condition要看你对管程模型理解得怎么样。管程的技术前面我们已经专门用了一篇文章做了介绍,你可以结合着来学,理论联系实践,有助于加深理解。
Lock&Condition实现的管程相对于synchronized实现的管程来说更加灵活、功能也更丰富。
结合我自己的经验,我认为了解原理比了解实现更能让你快速学好并发编程,所以没有介绍太多Java SDK并发包里锁和条件变量是如何实现的。但如果你对实现感兴趣,可以参考《Java并发编程的艺术》一书的第5章《Java中的锁》,里面详细介绍了实现原理,我觉得写得非常好。
另外,专栏里对DefaultFuture的代码缩减了很多,如果你感兴趣,也可以去看看完整版。
Dubbo的源代码在Github上,DefaultFuture的路径是:incubator-dubbo/dubbo-remoting/dubbo-remoting-api/src/main/java/org/apache/dubbo/remoting/exchange/support/DefaultFuture.java。
DefaultFuture里面唤醒等待的线程,用的是signal(),而不是signalAll(),你来分析一下,这样做是否合理呢?
欢迎在留言区与我分享你的想法,也欢迎你在留言区记录你的思考过程。感谢阅读,如果你觉得这篇文章对你有帮助的话,也欢迎把它分享给更多的朋友。
评论