你好,我是蒋德钧。今天这节课,我们来聊聊Redis的执行模型。
所谓的执行模型,就是指Redis运行时使用的进程、子进程和线程的个数,以及它们各自负责的工作任务。
你在实际使用Redis的时候,可能经常会听到类似“Redis是单线程”“Redis的主IO线程”,“Redis包含多线程”等不同说法。我也听到不少同学提出困惑和疑问:Redis到底是不是一个单线程的程序?
其实,彻底理解这个问题,有助于指导我们保持Redis高性能、低延迟的特性。如果说Redis就是单线程程序,那么,我们就需要避免所有容易引起线程阻塞的操作;而如果说Redis不只是单线程,还有其他线程在工作,那么,我们就需要了解多线程各自负责什么任务,负责请求解析和数据读写的线程有几个,有哪些操作是后台线程在完成,而不会影响请求解析和数据读写的。
所以,今天这节课,我就从Redis server启动后运行的进程开始,带你一边学习Redis源码中子进程和线程的创建方式,一边掌握Redis server运行时涉及到的进程、子进程和线程情况。
下面,我们先来看Redis server启动时的进程运行。
我们在启动Redis实例时,可以在shell命令行环境中,执行redis-server这个可执行文件,如下所示:
./redis-server /etc/redis/redis.conf
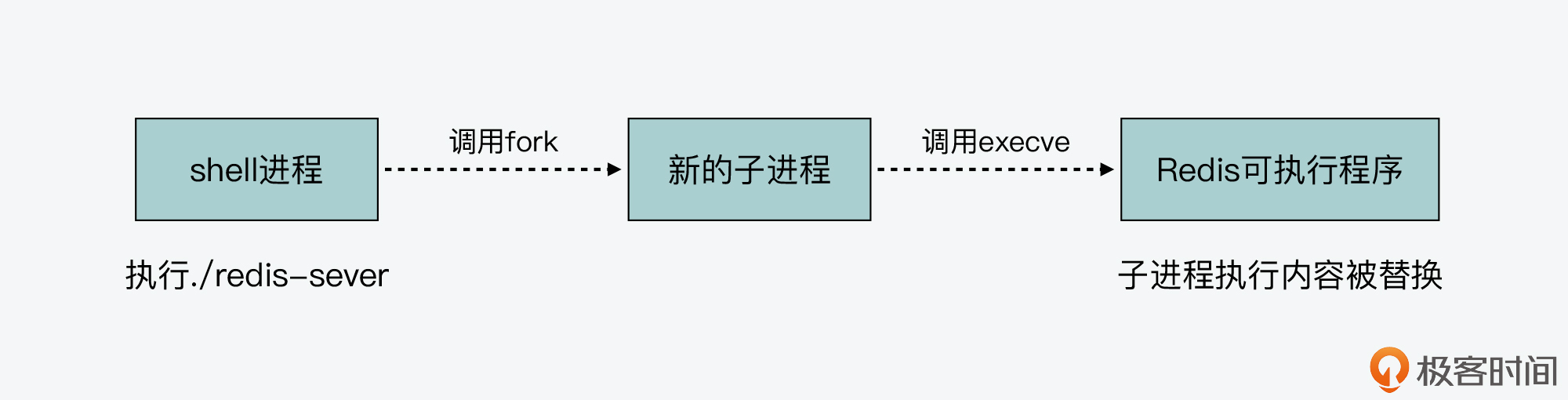
shell运行这个命令后,它实际会调用fork系统调用函数,来新建一个进程。因为shell本身是一个进程,所以,这个通过fork新创建的进程就被称为是shell进程的子进程,而shell进程被称为父进程。关于fork函数的具体用法,我一会儿还会给你具体介绍。
紧接着,shell进程会调用execve系统调用函数,将子进程执行的主体替换成Redis的可执行文件。而Redis可执行文件的入口函数就是main函数,这样一来,子进程就会开始执行Redis server的main函数了。
下面的代码显示了execve系统调用函数原型。其中,filename是要运行的程序的文件名,argv[]和envp[]分别是要运行程序的参数和环境变量。
int execve(const char *filename, char *const argv[], char *const envp[]))
下图显示了从shell执行命令到创建Redis进程的过程,你可以看下。
当我们用刚才介绍的shell命令运行Redis server后,我们会看到Redis server启动后的日志输出会打印到终端屏幕上,如下所示:
37807:M 19 Aug 2021 07:29:36.372 # Server initialized
37807:M 19 Aug 2021 07:29:36.372 * DB loaded from disk: 0.000 seconds
37807:M 19 Aug 2021 07:29:36.372 * Ready to accept connections
这是因为shell进程调用fork函数创建的子进程,会从父进程中继承一些属性,比如父进程打开的文件描述符。对于shell进程来说,它打开的文件描述符包括0和1,这两个描述符分别代表了标准输入和标准输出。而execve函数只是把子进程的执行内容替换成Redis可执行文件,子进程从shell父进程继承到的标准输入和标准输出保持不变。
所以,Redis运行时通过serverLog函数打印的日志信息,就会默认输出到终端屏幕上了,也就是shell进程的标准输出。
而一旦Redis进程创建开始运行后,它就会从main函数开始执行。我们在第8讲中已经学习了main函数的主要执行过程,所以我们会发现,它会调用不同的函数来执行相关功能。比如,main函数调用initServerConfig函数初始化Redis server的运行参数,调用loadServerConfig函数解析配置文件参数。当main函数调用这些函数时,这些函数仍然是由原来的进程执行的。所以,在这种情况下,Redis仍然是单个进程在运行。
不过,在main函数完成参数解析后,会根据两个配置参数daemonize和supervised,来设置变量background的值。它们的含义分别是:
那么,我们来进一步了解下守护进程。守护进程是在系统后台运行的进程,独立于shell终端,不再需要用户在shell中进行输入了。一般来说,守护进程用于执行周期性任务或是等待相应事件发生再进行处理。Redis server本身就是在启动后,等待客户端输入,再进行处理。所以对于Redis这类服务器程序来说,我们通常会让它以守护进程方式运行。
好了,如果设置了Redis以守护进程方式执行,那么守护进程具体是怎么创建的呢?这就和main函数调用的daemonize函数相关了。daemonize函数就是用来将Redis进程转换为守护进程来运行。
下面的代码显示了main函数根据变量background值,来判断是否执行daemonize函数的逻辑,你可以看下。
//如果配置参数daemonize为1,supervised值为0,那么设置background值为1,否则,设置其为0。
int main(int argc, char **argv) {
…
int background = server.daemonize && !server.supervised;
//如果background值为1,调用daemonize函数。
if (background) daemonize();
…
}
也就是说,如果background的值为1,就表示Redis被设置为以守护进程方式运行,因此main函数就会调用daemonize函数。
那么,接下来,我们就来学习下daemonize函数是如何将Redis转为守护进程运行的。
我们首先来看daemonize函数的部分执行内容,如下所示。我们可以看到,daemonize函数调用了fork函数,并根据fork函数返回值有不同的分支代码。
void daemonize(void) {
…
if (fork() != 0) exit(0); //fork成功执行或失败,则父进程退出
setsid(); //创建新的session
…
}
从刚才的介绍中,我们已经知道,当我们在一个程序的函数中调用fork函数时,fork函数会创建一个子进程。而原本这个程序对应的进程,就称为这个子进程的父进程。那么,fork函数执行后的不同分支和父、子进程是什么关系呢?这就和fork函数的使用有关了。
实际上,fork函数的使用是比较有意思的,我们可以根据fork函数的不同返回值,来编写相应的分支代码,这些分支代码就对应了父进程和子进程各自要执行的逻辑。
为了便于你理解,我给你举个例子。我写了一段示例代码,这段代码的main函数会调用fork函数,并进一步根据fork函数的返回值是小于0、等于0,还是大于0,来执行不同的分支。注意,fork函数的不同返回值,其实代表了不同的含义,具体来说:
这段示例代码如下:
#include <stdio.h>
#include <unistd.h>
int main(int argc, char *argv[]) {
printf("hello main\n");
int rv = fork(); //fork函数的返回值
//返回值小于0,表示fork执行错误
if (rv < 0) {
fprintf(stderr, "fork failed\n");
}
//返回值等于0,对应子进程执行
else if (rv == 0) {
printf("I am child process %d\n", getpid());
}
//返回值大于0,对应父进程执行
else {
printf("I am parent process of (%d), %d\n", rc, getpid());
}
return 0;
}
在这段代码中,我根据fork函数的返回值,分别写了三个分支代码,其中返回值等于0对应的代码分支,是子进程执行的代码。子进程会打印字符串“I am child process”,并打印子进程的进程号。而返回值大于0对应的代码分支,是父进程的代码。父进程会打印字符串“I am parent process of”,并打印它所创建的子进程进程号和它自身的进程号。
那么,如果你把这段代码编译后执行,你可以看到类似如下的结果,父进程打印了它的进程号62794,而子进程则打印了它的进程号62795。这表明刚才示例代码中的不同分支的确是由父、子进程来执行的。这也就是说,我们可以在fork函数执行后,使用不同分支,让父、子进程执行不同内容。
hello main
I am parent process of (62795), 62794
I am child process 62795
好了,了解了fork函数创建子进程的知识后,我们再来看下刚才介绍的daemonize函数。
现在我们已经知道,daemonize函数调用fork函数后,可以根据fork函数返回值设置不同代码分支,对应父、子进程执行内容。其实,daemonize函数也的确设置了两个代码分支。
这个分支对应fork函数返回值不为0,表示fork函数成功执行后的父进程执行逻辑或是fork函数执行失败的执行逻辑。此时,父进程会调用exit(0)函数退出。也就是说,如果fork函数成功执行,父进程就退出了。当然,如果fork函数执行失败了,那么子进程也没有能成功创建,父进程也就退出执行了。你可以看下下面的代码,展示了这个分支。
void daemonize(void) {
…
if (fork() != 0) exit(0); //fork成功执行或失败,则父进程退出
…
}
这个分支对应fork函数返回值为0,为子进程的执行逻辑。子进程首先会调用setsid函数,创建一个新的会话。
然后,子进程会用open函数打开/dev/null设备,并把它的标准输入、标准输出和标准错误输出,重新定向到/dev/null设备。因为守护进程是在后台运行,它的输入输出是独立于shell终端的。所以,为了让Redis能以守护进程方式运行,这几步操作的目的就是把当前子进程的输入、输出由原来的shell终端,转向/dev/null设备,这样一来,就不再依赖于shell终端了,满足了守护进程的要求。
我把daemonize函数的代码放在这里,你可以看下。
void daemonize(void) {
…
setsid(); //为子进程创建新的session
//将子进程的标准输入、标准输出、标准错误输出重定向到/dev/null中
if ((fd = open("/dev/null", O_RDWR, 0)) != -1) {
dup2(fd, STDIN_FILENO);
dup2(fd, STDOUT_FILENO);
dup2(fd, STDERR_FILENO);
if (fd > STDERR_FILENO) close(fd);
}
}
好了,到这里,我们就了解了,Redis的main函数会根据配置参数daemonize和supervised,来判断是否以守护进程方式运行Redis。
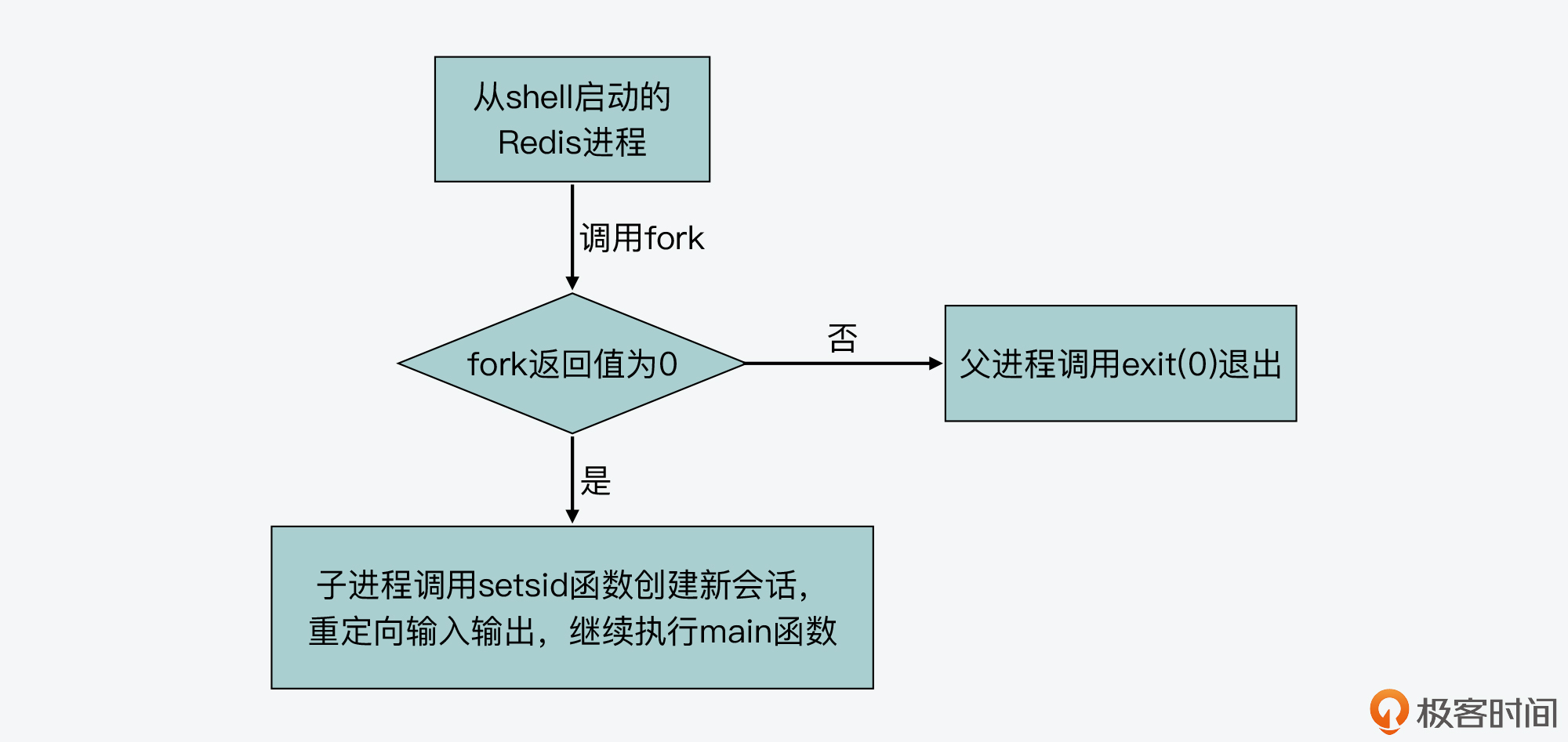
那么,一旦Redis要以守护进程方式运行,main函数会调用daemonize函数。daemonize函数会进一步调用fork函数创建子进程,并根据返回值,分别执行父进程和子进程的代码分支。其中,父进程会退出。而子进程会代替原来的父进程,继续执行main函数的代码。
下面的图展示了daemonize函数调用fork函数后的两个分支的执行逻辑,你可以再回顾下。
事实上,Redis server启动后无论是否以守护进程形式运行,都还是一个进程在运行。对于一个进程来说,如果该进程启动后没有创建新的线程,那么这个进程的工作任务默认就是由一个线程来执行的,而这个线程我一般也称它为主线程。
对于Redis来说,它的主要工作,包括接收客户端请求、解析请求和进行数据读写等操作,都没有创建新线程来执行,所以,Redis主要工作的确是由单线程来执行的,这也是我们常说Redis是单线程程序的原因。因为Redis主要工作都是IO读写操作,所以,我也会把这个单线程称为主IO线程。
但其实,Redis 在3.0版本后,除了主IO线程外,的确还会启动一些后台线程来处理部分任务,从而避免这些任务对主IO线程的影响。那么,这些后台线程是在哪里启动的,又是如何执行的呢?
这就和Redis的bio.c文件相关了。接下来,我们就来从这个文件中学习下Redis的后台线程。
我们先来看下main函数在初始化过程最后调用的InitServerLast函数。InitServerLast函数的作用是进一步调用bioInit函数,来创建后台线程,让Redis把部分任务交给后台线程处理。这个过程如下所示。
void InitServerLast() {
bioInit();
…
}
bioInit函数是在bio.c文件中实现的,它的主要作用调用pthread_create函数创建多个后台线程。不过在具体了解bioInit函数之前,我们先来看下bio.c文件中定义的主要数组,这也是在bioInit函数中要进行初始化的。
bio.c文件针对要创建的线程,定义了pthread_t类型的数组bio_threads,用来保存创建的线程描述符。此外,bio.c文件还创建了一个保存互斥锁的数组bio_mutex,以及两个保存条件变量的数组bio_newjob_cond和bio_step_cond。以下代码展示了这些数组的创建逻辑,你可以看下。
//保存线程描述符的数组
static pthread_t bio_threads[BIO_NUM_OPS];
//保存互斥锁的数组
static pthread_mutex_t bio_mutex[BIO_NUM_OPS];
//保存条件变量的两个数组
static pthread_cond_t bio_newjob_cond[BIO_NUM_OPS];
static pthread_cond_t bio_step_cond[BIO_NUM_OPS];
从中你可以注意到,这些数组的大小都是宏定义BIO_NUM_OPS,这个宏定义是在bio.h文件中定义的,默认值为3。
同时在bio.h文件中,你还可以看到另外三个宏定义,分别是BIO_CLOSE_FILE、BIO_AOF_FSYNC和BIO_LAZY_FREE。它们的代码如下所示:
#define BIO_CLOSE_FILE 0 /* Deferred close(2) syscall. */
#define BIO_AOF_FSYNC 1 /* Deferred AOF fsync. */
#define BIO_LAZY_FREE 2 /* Deferred objects freeing. */
#define BIO_NUM_OPS 3
其中,BIO_NUM_OPS表示的是Redis后台任务的类型有三种。而BIO_CLOSE_FILE、BIO_AOF_FSYNC和BIO_LAZY_FREE,它们分别表示三种后台任务的操作码,这些操作码可以用来标识不同的任务。
实际上,bio.c文件创建的线程数组、互斥锁数组和条件变量数组,大小都是包含三个元素,也正是对应了这三种任务。
接下来,我们再来了解下bio.c文件中的初始化和线程创建函数bioInit。我刚才也给你介绍过这个函数,它是main函数执行完server初始化后,通过InitServerLast函数调用的。也就是说,Redis在完成server初始化后,就会创建线程来执行后台任务。
所以从这里来看,Redis在运行时其实已经不止是单个线程(也就是主IO线程)在运行了,还会有后台线程在运行。如果你以后遇到Redis是否是单线程的问题时,你就可以给出准确答案了。
bioInit函数首先会初始化互斥锁数组和条件变量数组。然后,该函数会调用listCreate函数,给bio_jobs这个数组的每个元素创建一个列表,同时给bio_pending数组的每个元素赋值为0。这部分代码如下所示:
for (j = 0; j < BIO_NUM_OPS; j++) {
pthread_mutex_init(&bio_mutex[j],NULL);
pthread_cond_init(&bio_newjob_cond[j],NULL);
pthread_cond_init(&bio_step_cond[j],NULL);
bio_jobs[j] = listCreate();
bio_pending[j] = 0;
}
那么,要想了解给bio_jobs数组和bio_pending数组元素赋值的作用,我们就需要先搞清楚这两个数组的含义:
下面的代码展示了bio_job结构体,以及bio_jobs和bio_pending这两个数组的定义,你也可以看下。
struct bio_job {
time_t time; //任务创建时间
void *arg1, *arg2, *arg3; //任务参数
};
//以后台线程方式运行的任务列表
static list *bio_jobs[BIO_NUM_OPS];
//被阻塞的后台任务数组
static unsigned long long bio_pending[BIO_NUM_OPS];
好了,到这里,你就了解了bioInit函数执行时,会把线程互斥锁、条件变量对应数组初始化为NULL,同时会给每个后台线程创建一个任务列表(对应bio_jobs数组的元素),以及会设置每种任务的待处理个数为0(对应bio_pending数组的元素)。
在完成了初始化之后,接下来,bioInit函数会先通过pthread_attr_t类型的变量,给线程设置属性。然后,bioInit函数会调用前面我提到的pthread_create函数来创建线程。
不过,为了能更好地理解bioInit函数设置线程属性和创建线程的过程,我们需要先对pthread_create函数本身有所了解,该函数的原型如下所示:
int pthread_create(pthread_t *tidp, const pthread_attr_t *attr,
( void *)(*start_routine)( void *), void *arg);
可以看到,pthread_create函数一共有4个参数,分别是:
了解了pthread_create函数之后,我们来看下bioInit函数的具体操作。
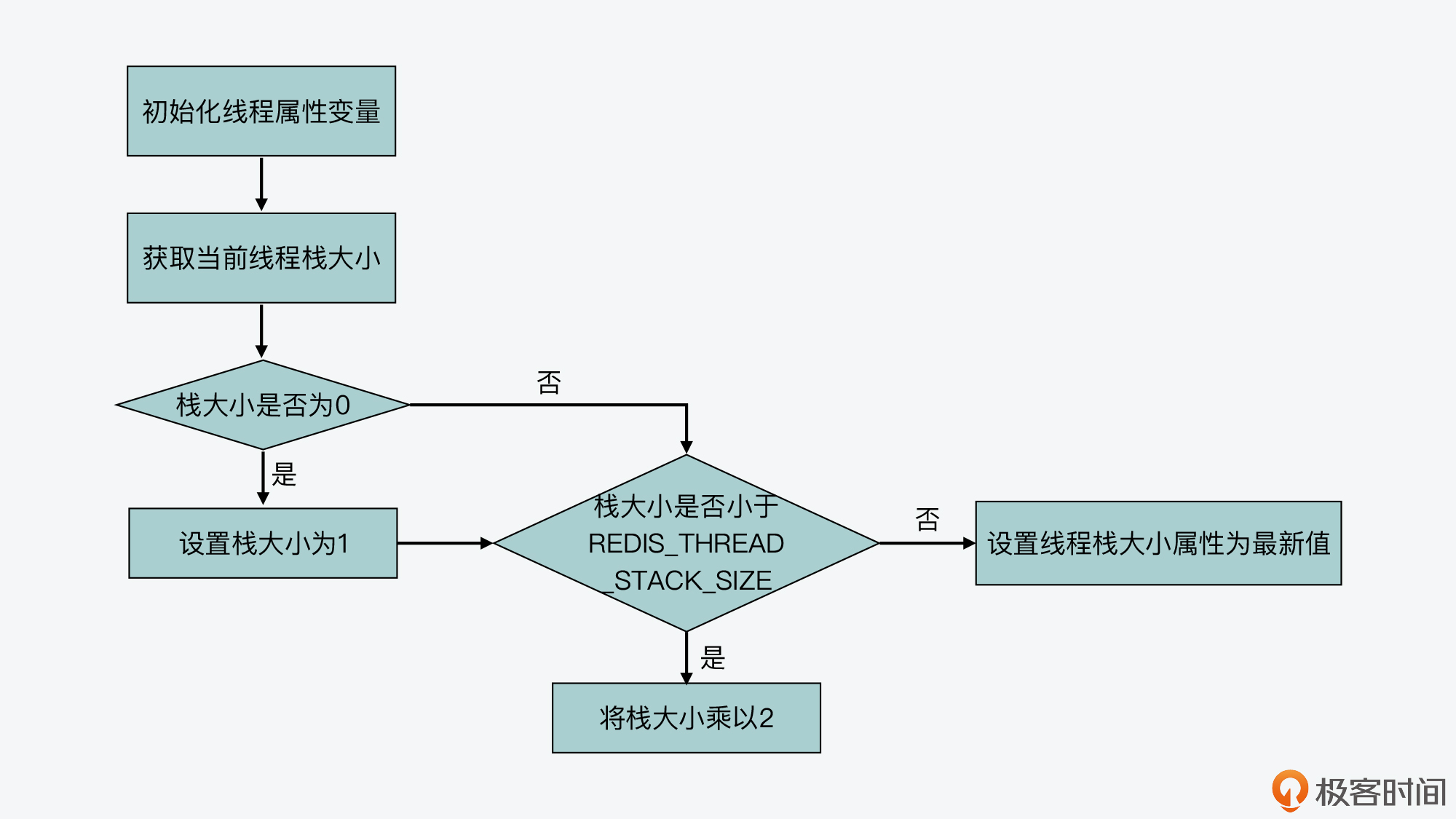
首先,bioInit函数会调用pthread_attr_init函数,初始化线程属性变量attr,然后调用pthread_attr_getstacksize函数,获取线程的栈大小这一属性的当前值,并根据当前栈大小和REDIS_THREAD_STACK_SIZE宏定义的大小(默认值为4MB),来计算最终的栈大小属性值。紧接着,bioInit函数会调用pthread_attr_setstacksize函数,来设置栈大小这一属性值。
下面的代码展示了线程属性的获取、计算和设置逻辑,你可以看下。
pthread_attr_init(&attr);
pthread_attr_getstacksize(&attr,&stacksize);
if (!stacksize) stacksize = 1; /针对Solaris系统做处理
while (stacksize < REDIS_THREAD_STACK_SIZE) stacksize *= 2;
pthread_attr_setstacksize(&attr, stacksize);
我也画了一张图,展示了线程属性的这一操作过程,你可以看下。
在完成线程属性的设置后,接下来,bioInit函数会通过一个for循环,来依次为每种后台任务创建一个线程。循环的次数是由BIO_NUM_OPS宏定义决定的,也就是3次。相应的,bioInit函数就会调用3次pthread_create函数,并创建3个线程。bioInit函数让这3个线程执行的函数都是bioProcessBackgroundJobs。
不过这里要注意一点,就是在这三次线程的创建过程中,传给这个函数的参数分别是0、1、2。这个创建过程如下所示:
for (j = 0; j < BIO_NUM_OPS; j++) {
void *arg = (void*)(unsigned long) j;
if (pthread_create(&thread,&attr,bioProcessBackgroundJobs,arg) != 0) {
… //报错信息
}
bio_threads[j] = thread;
}
你看了这个代码,可能会有一个小疑问:为什么创建的3个线程,它们所运行的bioProcessBackgroundJobs函数接收的参数分别是0、1、2呢?
这就和bioProcessBackgroundJobs函数的实现有关了,我们来具体看下。
首先,bioProcessBackgroundJobs函数会把接收到的参数arg,转成unsigned long类型,并赋值给type变量,如下所示:
void *bioProcessBackgroundJobs(void *arg) {
…
unsigned long type = (unsigned long) arg;
…
}
而type变量表示的就是后台任务的操作码。这也是我刚才给你介绍的三种后台任务类型BIO_CLOSE_FILE、BIO_AOF_FSYNC和BIO_LAZY_FREE对应的操作码,它们的取值分别为0、1、2。
bioProcessBackgroundJobs函数的主要执行逻辑是一个while(1)的循环。在这个循环中,bioProcessBackgroundJobs函数会从bio_jobs这个数组中取出相应任务,并根据任务类型,调用具体的函数来执行。
我刚才已经介绍过,bio_jobs数组的每一个元素是一个队列。而因为bio_jobs数组的元素个数,等于后台任务的类型个数(也就是BIO_NUM_OPS),所以,bio_jobs数组的每个元素,实际上是对应了某一种后台任务的任务队列。
在了解了这一点后,我们就容易理解bioProcessBackgroundJobs函数中的while循环了。因为传给bioProcessBackgroundJobs函数的参数,分别是0、1、2,对应了三种任务类型,所以在这个循环中,bioProcessBackgroundJobs函数会一直不停地从某一种任务队列中,取出一个任务来执行。
同时,bioProcessBackgroundJobs函数会根据传入的任务操作类型调用相应函数,具体来说:
最后,当某个任务执行完成后,bioProcessBackgroundJobs函数会从任务队列中,把这个任务对应的数据结构删除。我把这部分代码放在这里,你可以看下。
while(1) {
listNode *ln;
…
//从类型为type的任务队列中获取第一个任务
ln = listFirst(bio_jobs[type]);
job = ln->value;
…
//判断当前处理的后台任务类型是哪一种
if (type == BIO_CLOSE_FILE) {
close((long)job->arg1); //如果是关闭文件任务,那就调用close函数
} else if (type == BIO_AOF_FSYNC) {
redis_fsync((long)job->arg1); //如果是AOF同步写任务,那就调用redis_fsync函数
} else if (type == BIO_LAZY_FREE) {
//如果是惰性删除任务,那根据任务的参数分别调用不同的惰性删除函数执行
if (job->arg1)
lazyfreeFreeObjectFromBioThread(job->arg1);
else if (job->arg2 && job->arg3)
lazyfreeFreeDatabaseFromBioThread(job->arg2,job->arg3);
else if (job->arg3)
lazyfreeFreeSlotsMapFromBioThread(job->arg3);
} else {
serverPanic("Wrong job type in bioProcessBackgroundJobs().");
}
…
//任务执行完成后,调用listDelNode在任务队列中删除该任务
listDelNode(bio_jobs[type],ln);
//将对应的等待任务个数减一。
bio_pending[type]--;
…
}
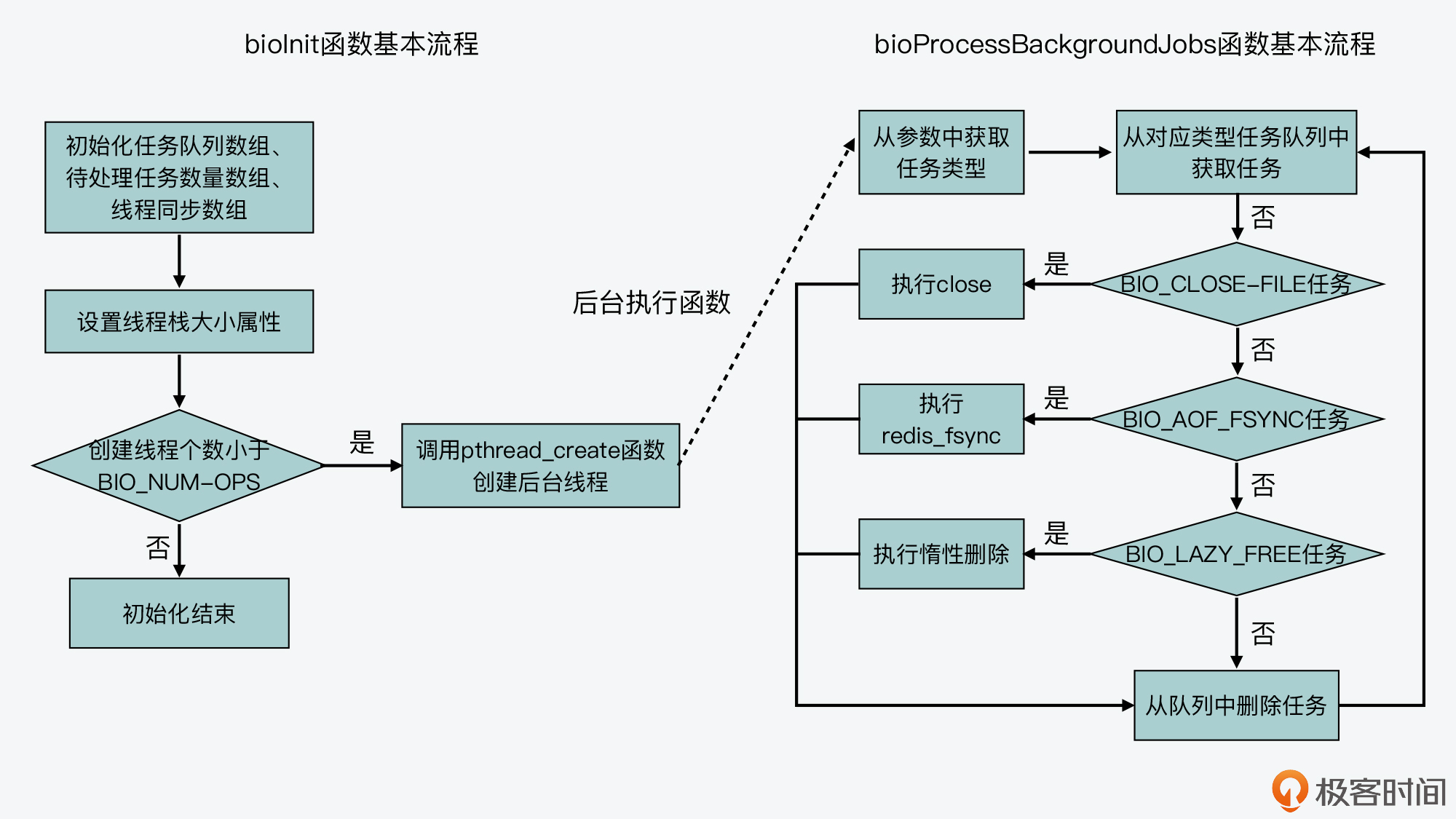
所以说,bioInit函数其实就是创建了3个线程,每个线程不停地去查看任务队列中是否有任务,如果有任务,就调用具体函数执行。
你可以再参考回顾下图所展示的bioInit函数和bioProcessBackgroundJobs函数的基本处理流程。
不过接下来你或许还会疑惑:既然bioProcessBackgroundJobs函数是负责执行任务的,那么哪个函数负责生成任务呢?
这就是下面,我要给你介绍的后台任务创建函数bioCreateBackgroundJob。
bioCreateBackgroundJob函数的原型如下,它会接收4个参数,其中,参数type表示该后台任务的类型,剩下来的3个参数,则对应了后台任务函数的参数,如下所示:
void bioCreateBackgroundJob(int type, void *arg1, void *arg2, void *arg3)
bioCreateBackgroundJob函数在执行时,会先创建bio_job,这是后台任务对应的数据结构。然后,后台任务数据结构中的参数,会被设置为bioCreateBackgroundJob函数传入的参数arg1、arg2和arg3。
最后,bioCreateBackgroundJob函数调用listAddNodeTail函数,将刚才创建的任务加入到对应的bio_jobs队列中,同时,将bio_pending数组的对应值加1,表示有个任务在等待执行。
{
//创建新的任务
struct bio_job *job = zmalloc(sizeof(*job));
//设置任务数据结构中的参数
job->time = time(NULL);
job->arg1 = arg1;
job->arg2 = arg2;
job->arg3 = arg3;
pthread_mutex_lock(&bio_mutex[type]);
listAddNodeTail(bio_jobs[type],job); //将任务加到bio_jobs数组的对应任务列表中
bio_pending[type]++; //将对应任务列表上等待处理的任务个数加1
pthread_cond_signal(&bio_newjob_cond[type]);
pthread_mutex_unlock(&bio_mutex[type]);
}
好了,这样一来,当Redis进程想要启动一个后台任务时,只要调用bioCreateBackgroundJob函数,并设置好该任务对应的类型和参数即可。然后,bioCreateBackgroundJob函数就会把创建好的任务数据结构,放到后台任务对应的队列中。另一方面,bioInit函数在Redis server启动时,创建的线程会不断地轮询后台任务队列,一旦发现有任务可以执行,就会将该任务取出并执行。
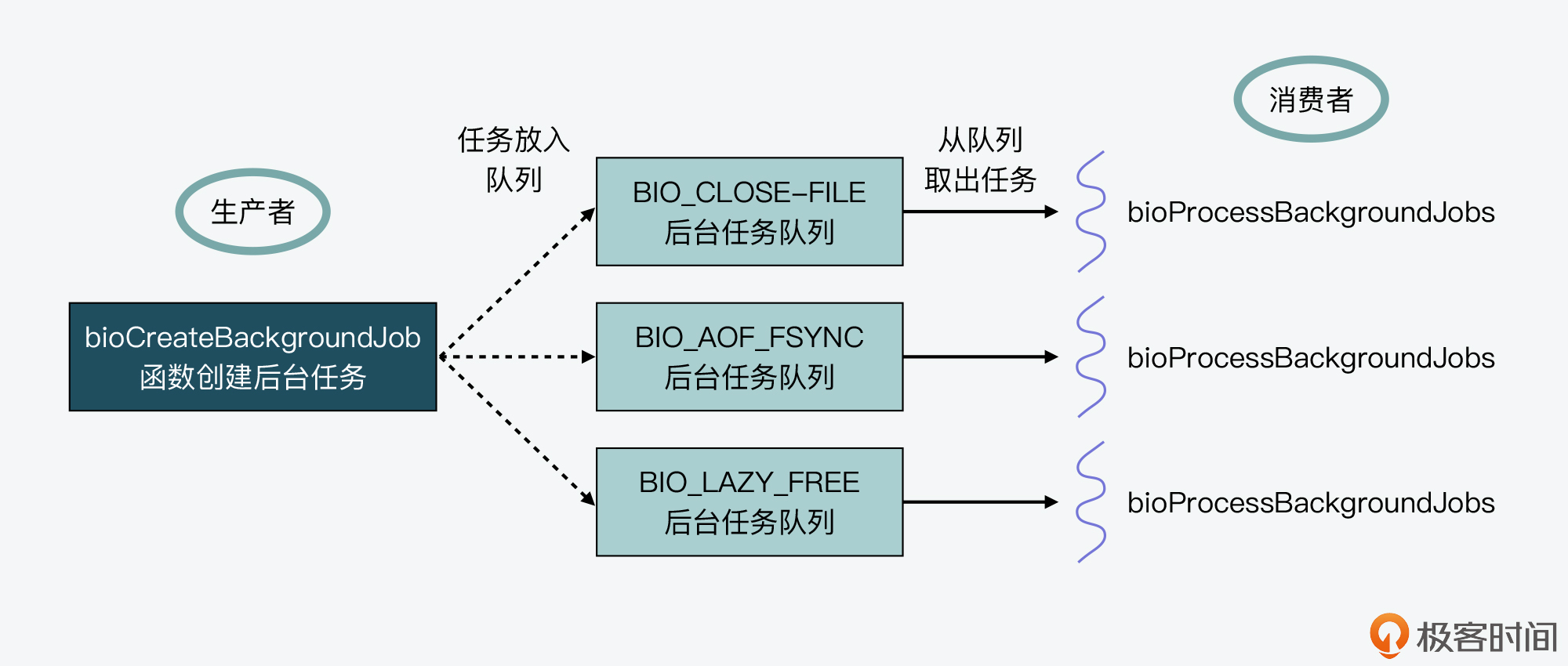
其实,这种设计方式是典型的生产者-消费者模型。bioCreateBackgroundJob函数是生产者,负责往每种任务队列中加入要执行的后台任务,而bioProcessBackgroundJobs函数是消费者,负责从每种任务队列中取出任务来执行。然后Redis创建的后台线程,会调用bioProcessBackgroundJobs函数,从而实现一直循环检查任务队列。
下图展示的就是bioCreateBackgroundJob和bioProcessBackgroundJobs两者间的生产者-消费者模型,你可以看下。
好了,到这里,我们就学习了Redis后台线程的创建和运行机制。简单来说,主要是以下三个关键点:
今天这节课,我给你介绍了Redis的执行模型,并且也从源码的角度出发,通过分析代码,带你了解了Redis进程创建、以子进程方式创建的守护进程、以及后台线程和它们负责的工作任务。同时,这也解答了你在面试中可能经常会被问到的问题:Redis是单线程程序吗?
事实上,Redis server启动后,它的主要工作包括接收客户端请求、解析请求和进行数据读写等操作,是由单线程来执行的,这也是我们常说Redis是单线程程序的原因。
但是,学完这节课你应该也知道,Redis还启动了3个线程来执行文件关闭、AOF同步写和惰性删除等操作,从这个角度来说,Redis又不能算单线程程序,它还是有多线程的。而且,在下节课,我会给你介绍Redis 6.0中多IO线程的实现,从多IO线程角度看,Redis也无法称为是单线程程序了。
另外学完了这节课之后,你还需要重点注意下,fork函数使用和生产者-消费者模型这两个关键知识点。
首先是fork函数的使用。fork函数可以在一个进程运行时,再创建一个子进程。当Redis被配置为以守护进程方式运行时,Redis的main函数就是调用fork函数,创建子进程,让子进程以守护进程形式执行,并让一开始启动执行的父进程退出。因为,子进程会从父进程那继承代码,所以main函数中的执行逻辑就交给了子进程继续执行。
其次是生产者-消费者模型。Redis在bio.c和bio.h文件中创建了后台线程,并实现了后台任务的执行。你要重点关注一下这里使用的生产者-消费者执行模型,这也是bio.c实现后台任务执行的核心设计思想。而且,当你需要实现异步的任务执行时,生产者-消费者模型就是一个很好的解决方案,你可以从Redis源码中掌握这个方案的实现思路。
Redis后台任务使用bio_job结构体来描述,该结构体用了三个指针变量来表示任务参数,如下所示。如果我们创建的任务,所需要的参数大于3个,你有什么应对方法来传参么?
struct bio_job {
time_t time;
void *arg1, *arg2, *arg3; //传递给任务的参数
};
欢迎在留言区分享你的答案和思考过程,如果觉得有收获,也欢迎你把今天的内容分享给更多的朋友。
评论