你好,我是蒋德钧。
分布式锁是Redis在实际业务场景中的一个重要应用。当有多个客户端并发访问某个共享资源时,比如要修改数据库中的某条记录,为了避免记录修改冲突,我们可以让所有客户端从Redis上获取分布式锁,只有拿到锁的客户端才能操作共享资源。
那么,对于分布式锁来说,它实现的关键就是要保证加锁和解锁两个操作是原子操作,这样才能保证多客户端访问时锁的正确性。而通过前面课程的学习,你知道Redis能通过事件驱动框架同时捕获多个客户端的可读事件,也就是命令请求。此外,在Redis 6.0版本中,多个IO线程会被用于并发地读取或写回数据。
而既然如此,你就可以来思考一个问题:分布式锁的原子性还能得到保证吗?
今天这节课呢,我就带你来了解下一条命令在Redis server中的执行过程,然后结合分布式锁的要求,来带你看下命令执行的原子性是如何保证的。同时,我们再来看看在有IO多路复用和多IO线程的情况下,分布式锁的原子性是否会受到影响。
这样一来,你就既可以掌握客户端的一条命令是如何完成执行的,其原子性是如何得到保证的,而且还可以把之前学习到的知识点串接应用起来。要知道,了解客户端命令的执行过程,对于日常排查Redis问题也是非常有帮助的,你可以在命令执行的过程中加入检测点,以便分析和排查运行问题。
好,那么接下来,我们就先来了解下分布式锁的实现方法,这样就能知道分布式锁对应的实现命令,以便进行进一步分析。
我们在第一季的课程中,有学习过分布式锁的实现,你可以再去回顾下。这里,我再来简要介绍下分布式锁的加锁和解锁实现的命令。
首先,对于分布式锁的加锁操作来说,我们可以使用Redis的SET命令。Redis SET命令提供了NX和EX选项,这两个选项的含义分别是:
因此,我们可以让客户端发送以下命令来进行加锁。其中,lockKey是锁的名称,uid是客户端可以用来唯一标记自己的ID,expireTime是这个key所代表的锁的过期时间,当这个过期时间到了之后,这个key会被删除,相当于锁被释放了,这样就避免了锁一直无法释放的问题。
SET lockKey uid EX expireTime NX
而如果还没有客户端创建过锁,那么,假设客户端A发送了这个SET命令给Redis,如下所示:
SET stockLock 1033 EX 30 NX
这样,Redis就会创建对应的key为stockLock,而键值对的value就是这个客户端的ID 1033。此时,假设有另一个客户端B也发送了SET命令,如下所示,表示要把key为stockLock的键值对值,改为客户端B的ID 2033,也就是要加锁。
SET stockLock 2033 EX 30 NX
由于使用了NX选项,如果stockLock的key已经存在了,客户端B就无法对其进行修改了,也就无法获得锁了,这样就实现了加锁的效果。
而对于解锁来说,我们可以使用如下的Lua脚本来完成,而Lua脚本会以EVAL命令的形式在Redis server中执行。客户端会使用GET命令读取锁对应key的value,并判断value是否等于客户端自身的ID。如果等于,就表明当前客户端正拿着锁,此时可以执行DEL命令删除key,也就是释放锁;如果value不等于客户端自身ID,那么该脚本会直接返回。
if redis.call("get",lockKey) == uid then
return redis.call("del",lockKey)
else
return 0
end
这样一来,客户端就不会误删除别的客户端获得的锁了,从而保证了锁的安全性。
好,现在我们就了解了分布式锁的实现命令。那么在这里,我们需要搞明白的问题就是:无论是加锁的SET命令,还是解锁的Lua脚本和EVAL命令,在有IO多路复用时,会被同时执行吗?或者当我们使用了多IO线程后,会被多个线程同时执行吗?
这就和Redis中命令的执行过程有关了。下面,我们就来了解下,一条命令在Redis是如何完成执行的。同时,我们还会学习到,IO多路复用引入的多个并发客户端,以及多IO线程是否会破坏命令的原子性。
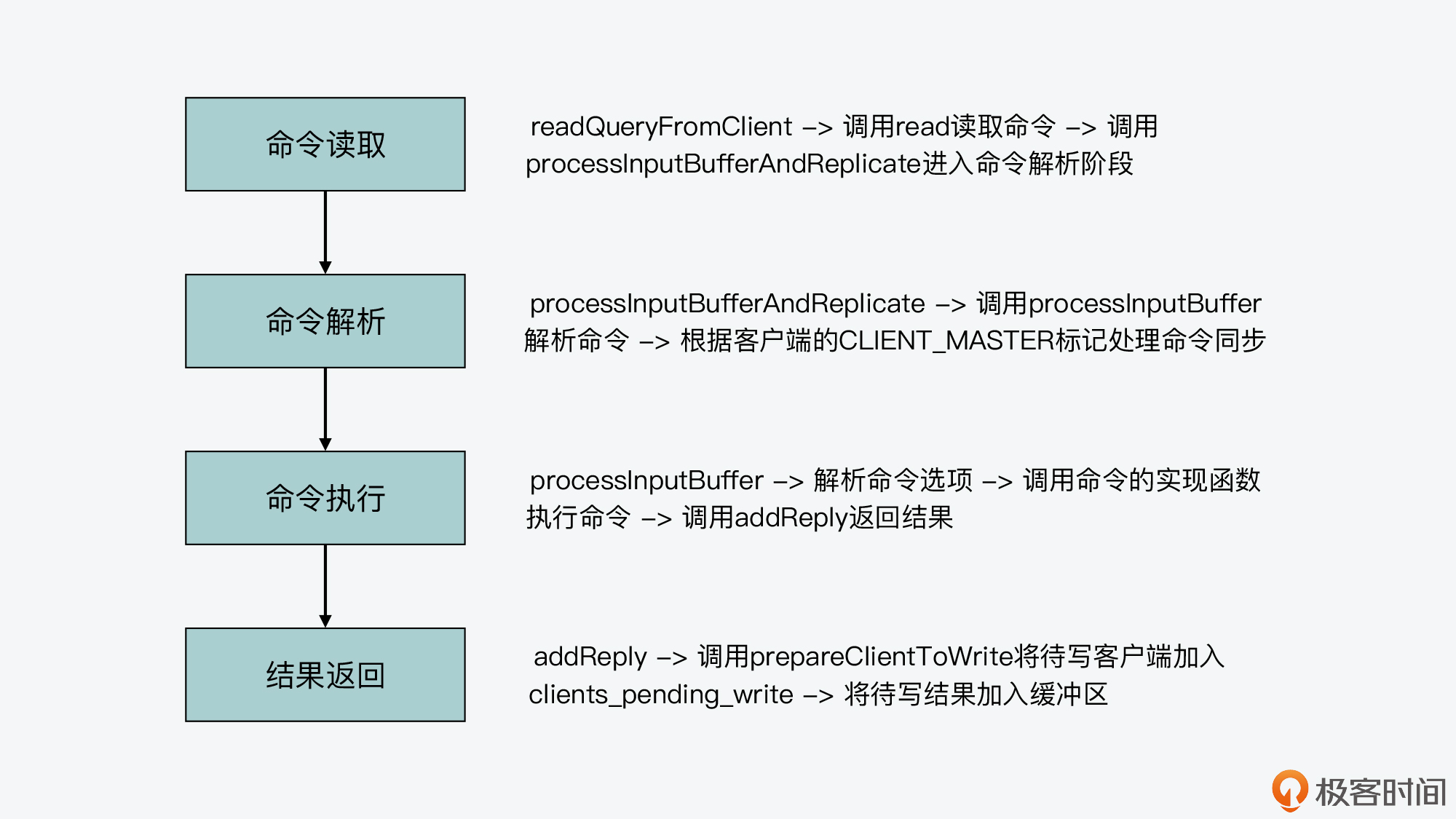
现在我们知道,Redis server一旦和一个客户端建立连接后,就会在事件驱动框架中注册可读事件,这就对应了客户端的命令请求。而对于整个命令处理的过程来说,我认为主要可以分成四个阶段,它们分别对应了Redis源码中的不同函数。这里,我把它们对应的入口函数,也就是它们是从哪个函数开始进行执行的,罗列如下:
那么下面,我们就来分别看下这四个入口函数的基本流程,以及为了完成命令执行,它们内部的主要调用关系都是怎样的。
首先,我们来了解下readQueryFromClient函数的基本流程。
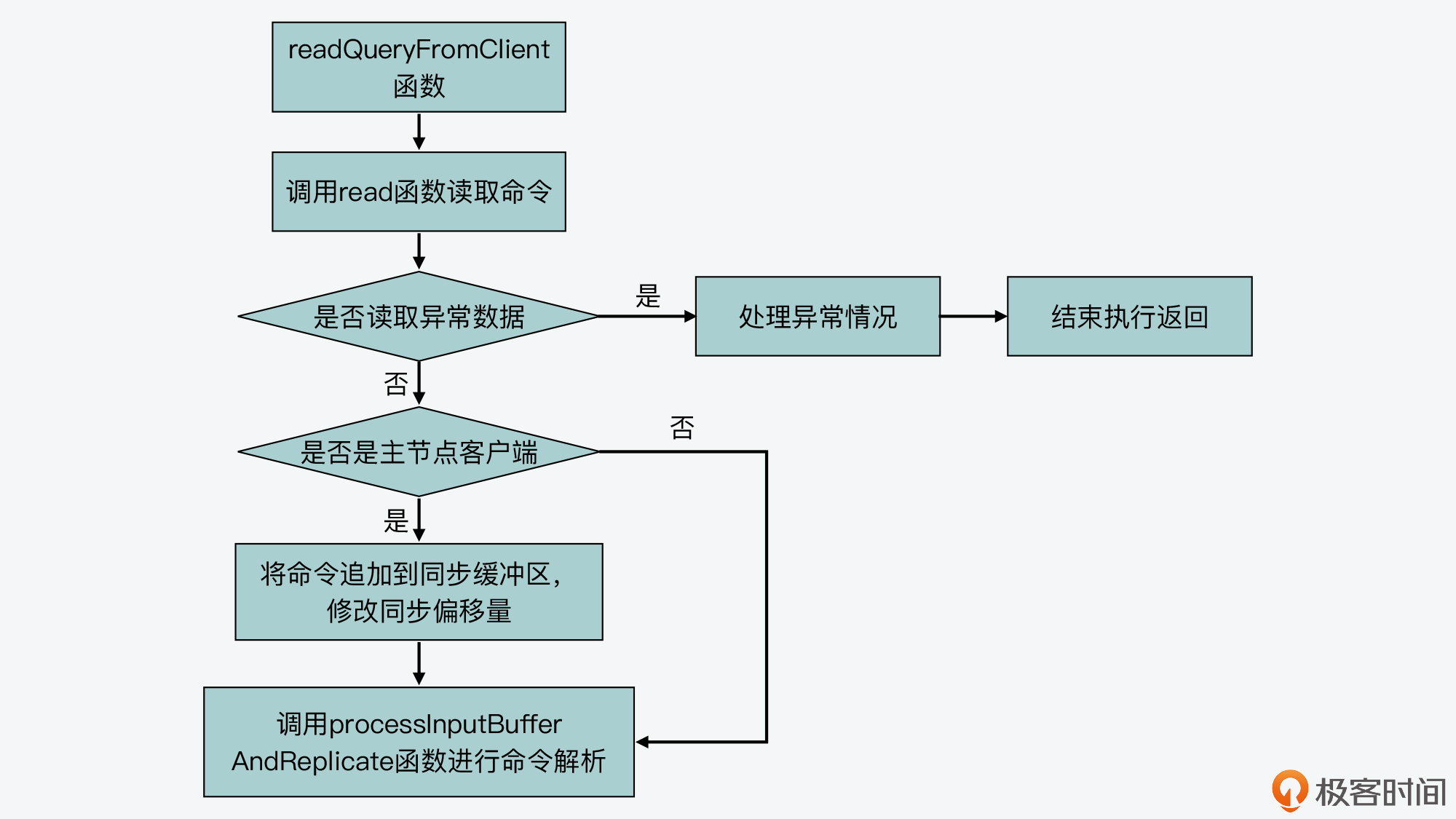
readQueryFromClient函数会从客户端连接的socket中,读取最大为readlen长度的数据,readlen值大小是宏定义PROTO_IOBUF_LEN。该宏定义是在server.h文件中定义的,默认值为16KB。
紧接着,readQueryFromClient函数会根据读取数据的情况,进行一些异常处理,比如数据读取失败或是客户端连接关闭等。此外,如果当前客户端是主从复制中的主节点,readQueryFromClient函数还会把读取的数据,追加到用于主从节点命令同步的缓冲区中。
最后,readQueryFromClient函数会调用processInputBufferAndReplicate函数,这就进入到了命令处理的下一个阶段,也就是命令解析阶段。
void readQueryFromClient(aeEventLoop *el, int fd, void *privdata, int mask) {
...
readlen = PROTO_IOBUF_LEN; //从客户端socket中读取的数据长度,默认为16KB
...
c->querybuf = sdsMakeRoomFor(c->querybuf, readlen); //给缓冲区分配空间
nread = read(fd, c->querybuf+qblen, readlen); //调用read从描述符为fd的客户端socket中读取数据
...
processInputBufferAndReplicate(c); //调用processInputBufferAndReplicate进一步处理读取内容
}
我在下面画了张图,展示了readQueryFromClient函数的基本流程,你可以看下。
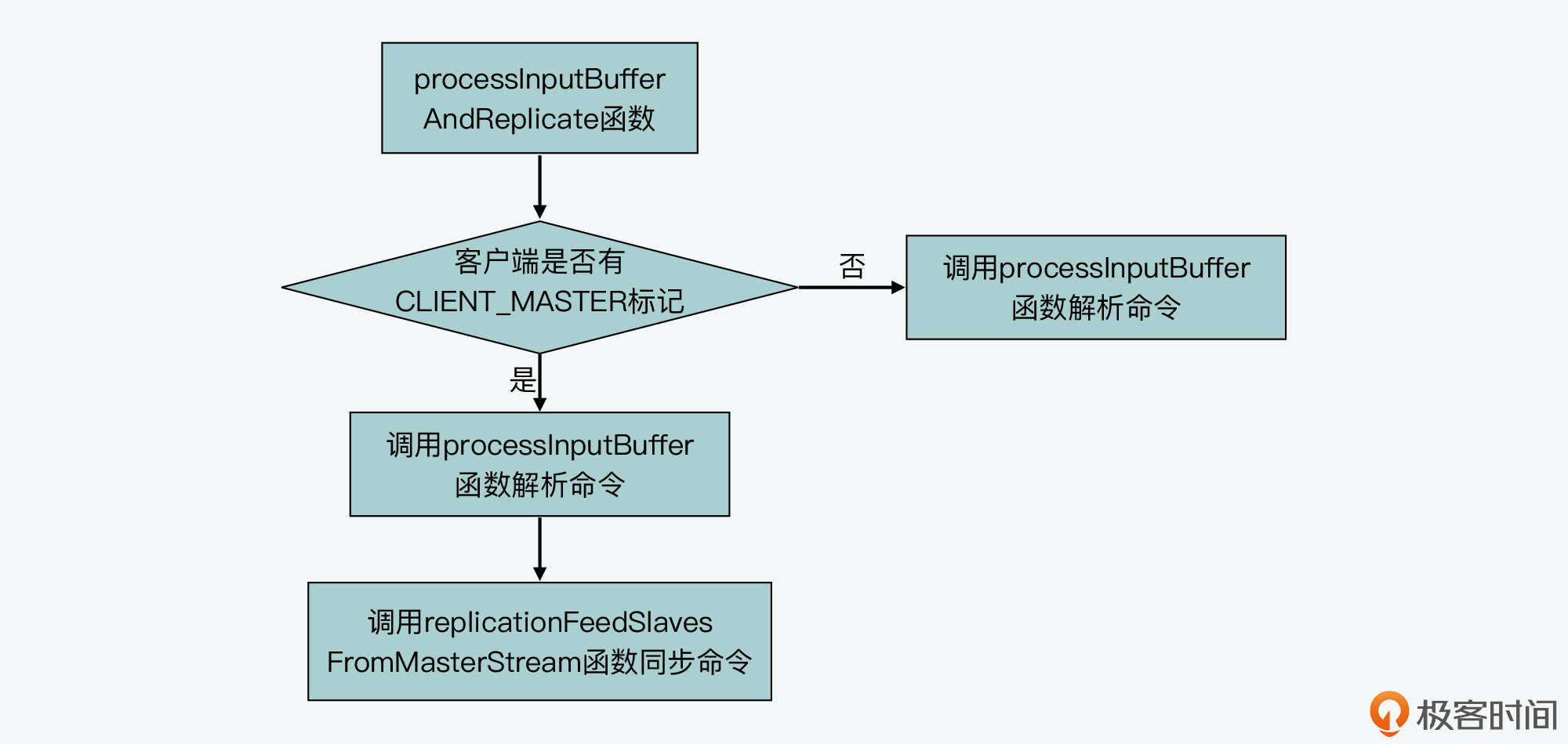
processInputBufferAndReplicate函数(在networking.c文件中)会根据当前客户端是否有CLIENT_MASTER标记,来执行两个分支。
这个分支对应了客户端没有CLIENT_MASTER标记,也就是说当前客户端不属于主从复制中的主节点。那么,processInputBufferAndReplicate函数会直接调用processInputBuffer(在networking.c文件中)函数,对客户端输入缓冲区中的命令和参数进行解析。所以在这里,实际执行命令解析的函数就是processInputBuffer函数。我们一会儿来具体看下这个函数。
这个分支对应了客户端有CLIENT_MASTER标记,也就是说当前客户端属于主从复制中的主节点。那么,processInputBufferAndReplicate函数除了调用processInputBuffer函数,解析客户端命令以外,它还会调用replicationFeedSlavesFromMasterStream函数(在replication.c文件中),将主节点接收到的命令同步给从节点。
下图就展示了processInputBufferAndReplicate函数的基本执行逻辑,你可以看下。
好了,我们刚才了解了,命令解析实际是在processInputBuffer函数中执行的,所以下面,我们还需要清楚这个函数的基本流程是什么样的。
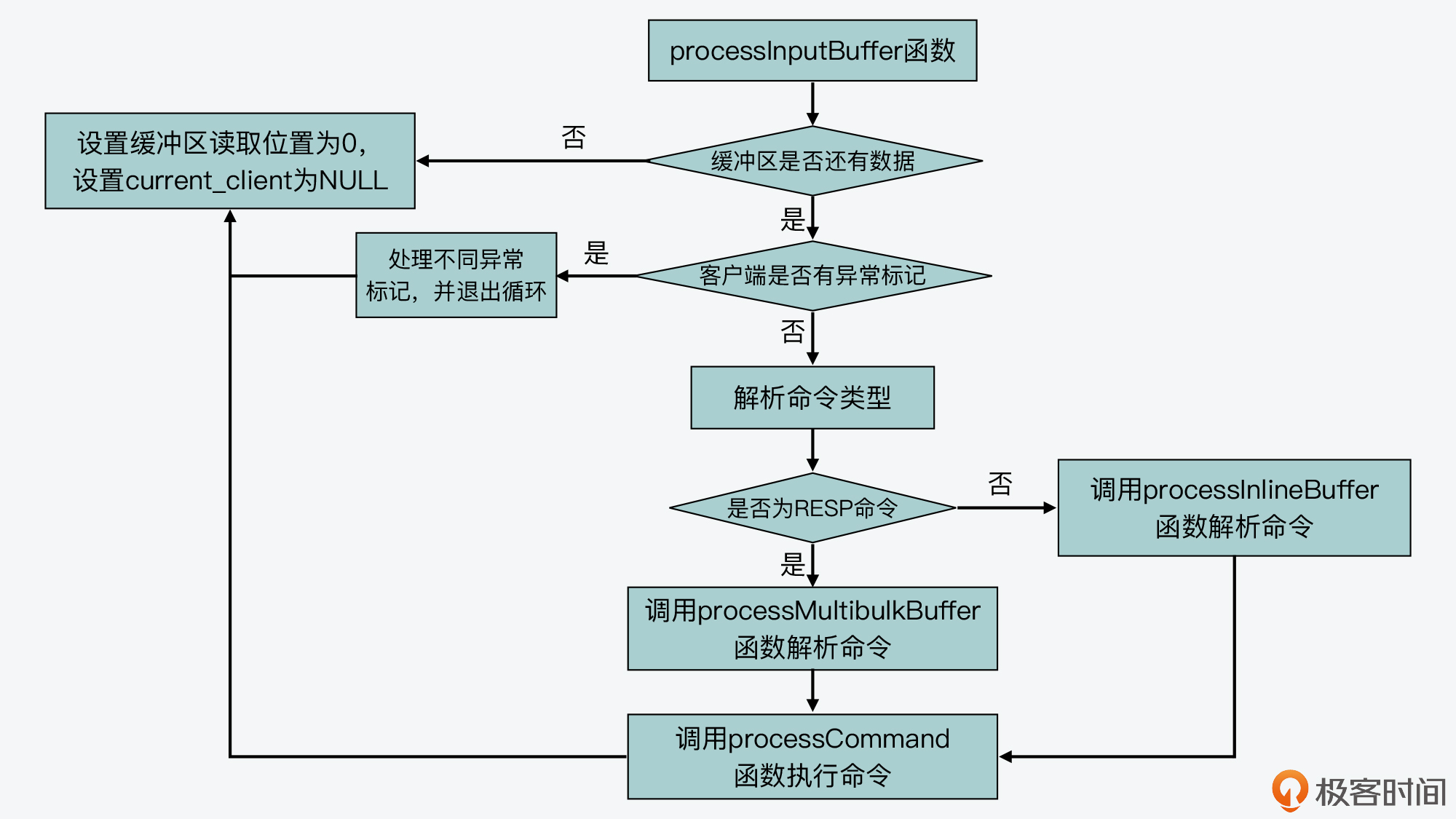
首先,processInputBuffer函数会执行一个while循环,不断地从客户端的输入缓冲区中读取数据。然后,它会判断读取到的命令格式,是否以“*”开头。
如果命令是以“*”开头,那就表明这个命令是PROTO_REQ_MULTIBULK类型的命令请求,也就是符合RESP协议(Redis客户端与服务器端的标准通信协议)的请求。那么,processInputBuffer函数就会进一步调用processMultibulkBuffer(在networking.c文件中)函数,来解析读取到的命令。
而如果命令不是以“*”开头,那则表明这个命令是PROTO_REQ_INLINE类型的命令请求,并不是RESP协议请求。这类命令也被称为管道命令,命令和命令之间是使用换行符“\r\n”分隔开来的。比如,我们使用Telnet发送给Redis的命令,就是属于PROTO_REQ_INLINE类型的命令。在这种情况下,processInputBuffer函数会调用processInlineBuffer(在networking.c文件中)函数,来实际解析命令。
这样,等命令解析完成后,processInputBuffer函数就会调用processCommand函数,开始进入命令处理的第三个阶段,也就是命令执行阶段。
下面的代码展示了processInputBuffer函数解析命令时的主要流程,你可以看下。
void processInputBuffer(client *c) {
while(c->qb_pos < sdslen(c->querybuf)) {
...
if (!c->reqtype) {
//根据客户端输入缓冲区的命令开头字符判断命令类型
if (c->querybuf[c->qb_pos] == '*') {
c->reqtype = PROTO_REQ_MULTIBULK; //符合RESP协议的命令
} else {
c->reqtype = PROTO_REQ_INLINE; //管道类型命令
}
}
if (c->reqtype == PROTO_REQ_INLINE) {
if (processInlineBuffer(c) != C_OK) break; //对于管道类型命令,调用processInlineBuffer函数解析
} else if (c->reqtype == PROTO_REQ_MULTIBULK) {
if (processMultibulkBuffer(c) != C_OK) break; //对于RESP协议命令,调用processMultibulkBuffer函数解析
}
...
if (c->argc == 0) {
resetClient(c);
} else {
//调用processCommand函数,开始执行命令
if (processCommand(c) == C_OK) {
... }
... }
}
...
}
下图展示了processInputBuffer函数的基本执行流程,你可以再回顾下。
好,那么下面,我们接着来看第三个阶段,也就是命令执行阶段的processCommand函数的基本处理流程。
首先,我们要知道,processCommand函数是在server.c文件中实现的。它在实际执行命令前的主要逻辑可以分成三步:
这里,你需要注意下,全局变量server的commands成员变量是一个哈希表,它的定义是在server.h文件中的redisServer结构体里面,如下所示:
struct redisServer {
...
dict *commands;
...
}
另外,commands成员变量的初始化是在initServerConfig函数中,通过调用dictCreate函数完成哈希表创建,再通过调用populateCommandTable函数,将Redis提供的命令名称和对应的实现函数,插入到哈希表中的。
void initServerConfig(void) {
...
server.commands = dictCreate(&commandTableDictType,NULL);
...
populateCommandTable();
...
}
而这其中的populateCommandTable函数,实际上是使用到了redisCommand结构体数组redisCommandTable。
redisCommandTable数组是在server.c文件中定义的,它的每一个元素是一个redisCommand结构体类型的记录,对应了Redis实现的一条命令。也就是说,redisCommand结构体中就记录了当前命令所对应的实现函数是什么。
比如,以下代码展示了GET和SET这两条命令的信息,它们各自的实现函数分别是getCommand和setCommand。当然,如果你想进一步了解redisCommand结构体,也可以去看下它的定义,在server.h文件当中。
struct redisCommand redisCommandTable[] = {
...
{"get",getCommand,2,"rF",0,NULL,1,1,1,0,0},
{"set",setCommand,-3,"wm",0,NULL,1,1,1,0,0},
...
}
好了,到这里,你就了解了lookupCommand函数会根据解析的命令名称,在commands对应的哈希表中查找相应的命令。
那么,一旦查到对应命令后,processCommand函数就会进行多种检查,比如命令的参数是否有效、发送命令的用户是否进行过验证、当前内存的使用情况,等等。这部分的处理逻辑比较多,你可以进一步阅读processCommand函数来了解下。
这样,等到processCommand函数对命令做完各种检查后,它就开始执行命令了。它会判断当前客户端是否有CLIENT_MULTI标记,如果有的话,就表明要处理的是Redis事务的相关命令,所以它会按照事务的要求,调用queueMultiCommand函数将命令入队保存,等待后续一起处理。
而如果没有,processCommand函数就会调用call函数来实际执行命令了。以下代码展示了这部分的逻辑,你可以看下。
//如果客户端有CLIENT_MULTI标记,并且当前不是exec、discard、multi和watch命令
if (c->flags & CLIENT_MULTI &&
c->cmd->proc != execCommand && c->cmd->proc != discardCommand &&
c->cmd->proc != multiCommand && c->cmd->proc != watchCommand)
{
queueMultiCommand(c); //将命令入队保存,等待后续一起处理
addReply(c,shared.queued);
} else {
call(c,CMD_CALL_FULL); //调用call函数执行命令
...
}
这里你要知道,call函数是在server.c文件中实现的,它执行命令是通过调用命令本身,即redisCommand结构体中定义的函数指针来完成的。而就像我刚才所说的,每个redisCommand结构体中都定义了它对应的实现函数,在redisCommandTable数组中能查找到。
因为分布式锁的加锁操作就是使用SET命令来实现的,所以这里,我就以SET命令为例来介绍下它的实际执行过程。
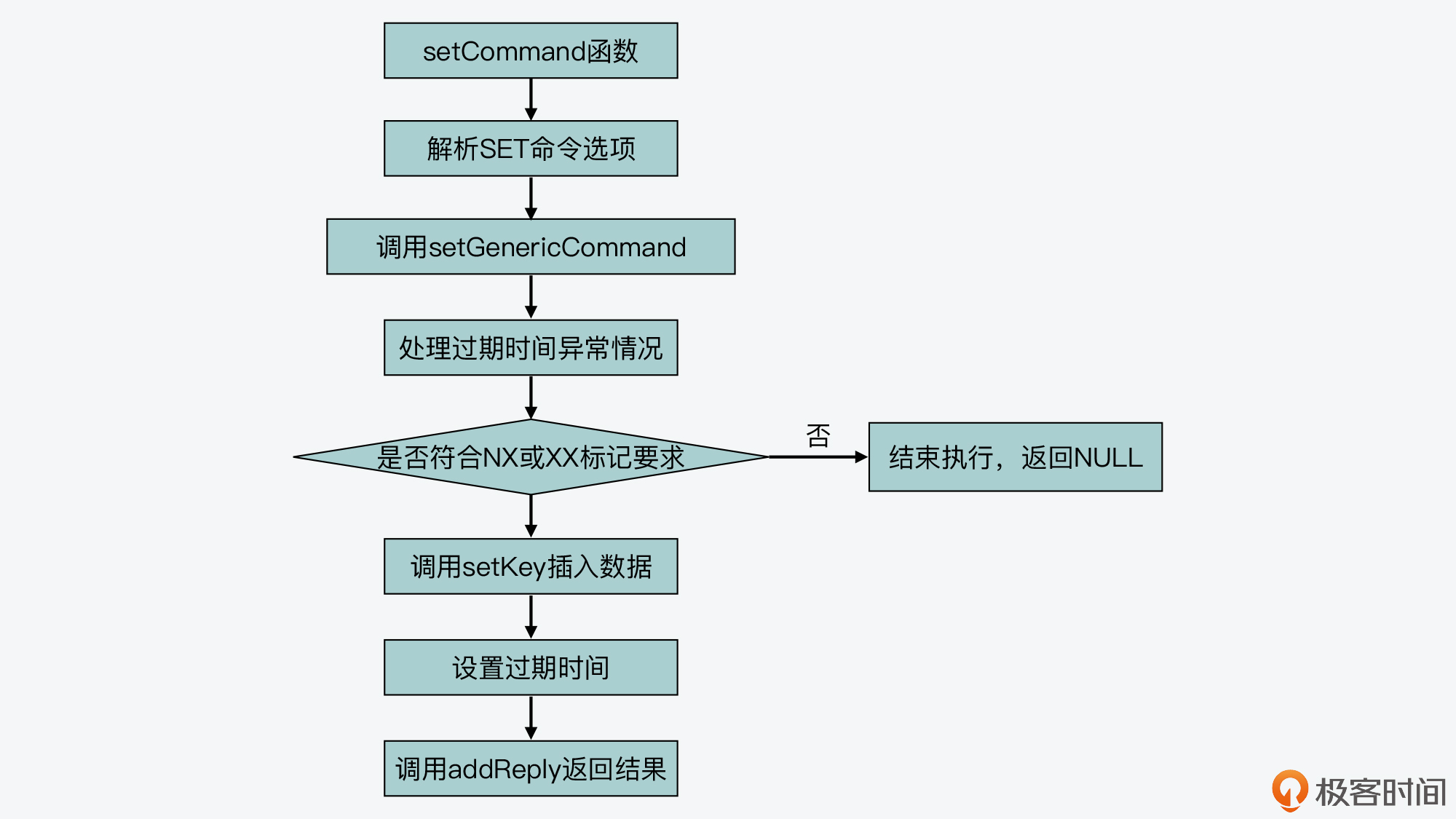
SET命令对应的实现函数是setCommand,这是在t_string.c文件中定义的。setCommand函数首先会对命令参数进行判断,比如参数是否带有NX、EX、XX、PX等这类命令选项,如果有的话,setCommand函数就会记录下这些标记。
然后,setCommand函数会调用setGenericCommand函数,这个函数也是在t_string.c文件中实现的。setGenericCommand函数会根据刚才setCommand函数记录的命令参数的标记,来进行相应处理。比如,如果命令参数中有NX选项,那么,setGenericCommand函数会调用lookupKeyWrite函数(在db.c文件中),查找要执行SET命令的key是否已经存在。
如果这个key已经存在了,那么setGenericCommand函数就会调用addReply函数,返回NULL空值,而这也正是符合分布式锁的语义的。
下面的代码就展示了这个执行逻辑,你可以看下。
//如果有NX选项,那么查找key是否已经存在
if ((flags & OBJ_SET_NX && lookupKeyWrite(c->db,key) != NULL) ||
(flags & OBJ_SET_XX && lookupKeyWrite(c->db,key) == NULL))
{
addReply(c, abort_reply ? abort_reply : shared.nullbulk); //如果已经存在,则返回空值
return;
}
好,那么如果SET命令可以正常执行的话,也就是说命令带有NX选项但是key并不存在,或者带有XX选项但是key已经存在,这样setGenericCommand函数就会调用setKey函数(在db.c文件中)来完成键值对的实际插入,如下所示:
setKey(c->db,key,val);
然后,如果命令设置了过期时间,setGenericCommand函数还会调用setExpire函数设置过期时间。最后,setGenericCommand函数会调用addReply函数,将结果返回给客户端,如下所示:
addReply(c, ok_reply ? ok_reply : shared.ok);
好了,到这里,SET命令的执行就结束了,你也可以再看下下面的基本流程图。
而且你也可以看到,无论是在命令执行的过程中,发现不符合命令的执行条件,或是命令能成功执行,addReply函数都会被调用,用来返回结果。所以,这就进入到我所说的命令处理过程的最后一个阶段:结果返回阶段。
addReply函数是在networking.c文件中定义的。它的执行逻辑比较简单,主要是调用prepareClientToWrite函数,并在prepareClientToWrite函数中调用clientInstallWriteHandler函数,将待写回客户端加入到全局变量server的clients_pending_write列表中。
然后,addReply函数会调用_addReplyToBuffer等函数(在networking.c中),将要返回的结果添加到客户端的输出缓冲区中。
好,现在你就了解一条命令是如何从读取,经过解析、执行等步骤,最终将结果返回给客户端的了。下图展示了这个过程以及涉及的主要函数,你可以再回顾下。
不过除此之外,你还需要注意一点,就是如果在前面的命令处理过程中,都是由IO主线程处理的,那么命令执行的原子性肯定能得到保证,分布式锁的原子性也就相应能得到保证了。
但是,如果这个处理过程配合上了我们前面介绍的IO多路复用机制和多IO线程机制,那么,这两个机制是在这个过程的什么阶段发挥作用的呢,以及会不会影响命令执行的原子性呢?
所以接下来,我们就来看下它们各自对原子性保证的影响。
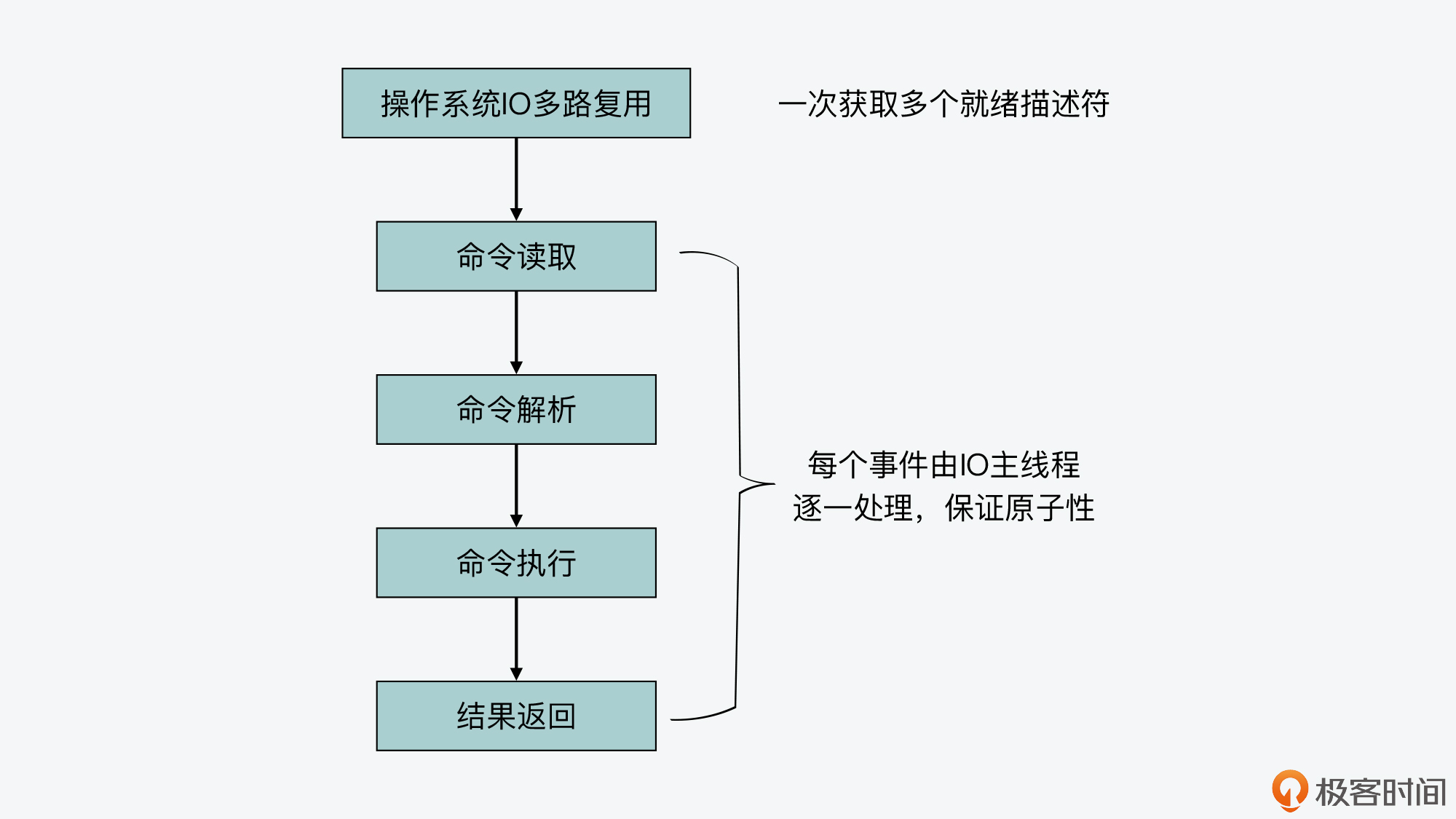
首先你要知道,IO多路复用机制是在readQueryFromClient函数执行前发挥作用的。它实际是在事件驱动框架中调用aeApiPoll函数,获取一批已经就绪的socket描述符。然后执行一个循环,针对每个就绪描述符上的读事件,触发执行readQueryFromClient函数。
这样一来,即使IO多路复用机制同时获取了多个就绪socket描述符,在实际处理时,Redis的主线程仍然是针对每个事件逐一调用回调函数进行处理的。而且对于写事件来说,IO多路复用机制也是针对每个事件逐一处理的。
下面的代码展示了IO多路复用机制通过aeApiPoll函数获取一批事件,然后逐一处理的逻辑,你可以再看下。
numevents = aeApiPoll(eventLoop, tvp);
for (j = 0; j < numevents; j++) {
aeFileEvent *fe = &eventLoop->events[eventLoop->fired[j].fd];
if (!invert && fe->mask & mask & AE_READABLE) {
fe->rfileProc(eventLoop,fd,fe->clientData,mask);
fired++;
}
所以这也就是说,即使使用了IO多路复用机制,命令的整个处理过程仍然可以由IO主线程来完成,也仍然可以保证命令执行的原子性。下图就展示了IO多路复用机制和命令处理过程的关系,你可以看下。
接下来,我们再来看下多IO线程对命令原子性保证的影响。
我们知道,多IO线程可以执行读操作或是写操作。那么,对于读操作来说,readQueryFromClient函数会在执行过程中,调用postponeClient将待读客户端加入clients_pending_read等待列表。这个过程你可以再回顾下第13讲。
然后,待读客户端会被分配给多IO线程执行,每个IO线程执行的函数就是readQueryFromClient函数,readQueryFromClient函数会读取命令,并进一步调用processInputBuffer函数解析命令,这个基本过程和Redis 6.0前的代码是一样的。
不过,相比于Redis 6.0前的代码,在Redis 6.0版本中,processInputBuffer函数中新增加了一个判断条件,也就是当客户端标识中有CLIENT_PENDING_READ的话,那么在解析完命令后,processInputBuffer函数只会把客户端标识改为CLIENT_PENDING_COMMAND,就退出命令解析的循环流程了。
此时,processInputBuffer函数只是解析了第一个命令,也并不会实际调用processCommand函数来执行命令,如下所示:
void processInputBuffer(client *c) {
/* Keep processing while there is something in the input buffer */
while(c->qb_pos < sdslen(c->querybuf)) {
...
if (c->argc == 0) {
resetClient(c);
} else {
//如果客户端有CLIENT_PENDING_READ标识,将其改为CLIENT_PENDING_COMMAND,就退出循环,并不调用processCommandAndResetClient函数执行命令
if (c->flags & CLIENT_PENDING_READ) {
c->flags |= CLIENT_PENDING_COMMAND;
break;
}
if (processCommandAndResetClient(c) == C_ERR) {
return;
}
}
}
}
这样,等到所有的IO线程都解析完了第一个命令后,IO主线程中执行的handleClientsWithPendingReadsUsingThreads函数,会再调用processCommandAndResetClient函数执行命令,以及调用processInputBuffer函数解析剩余命令,这部分的内容你也可以再回顾下第13讲。
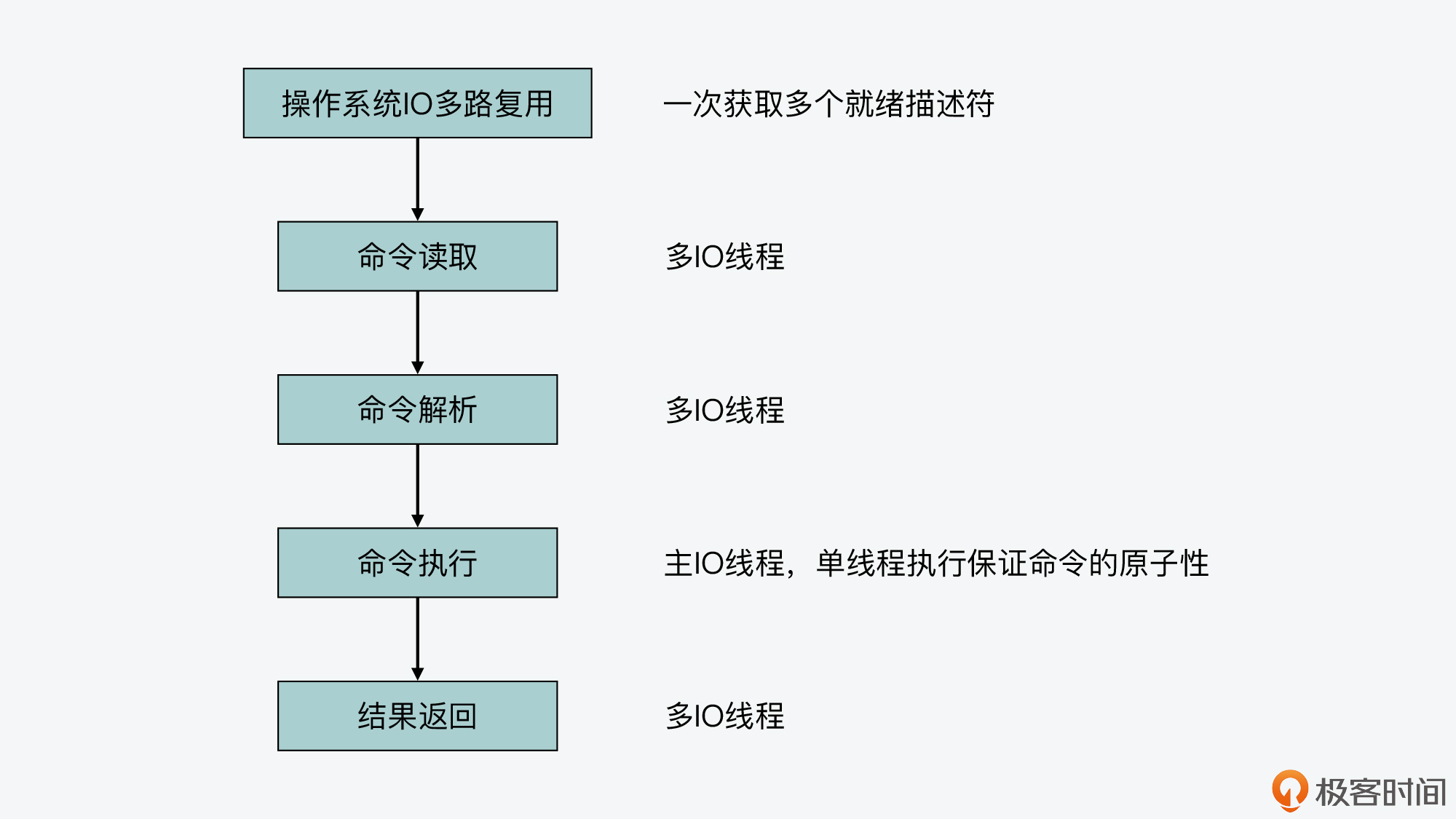
所以现在,你就可以知道,即使使用了多IO线程,其实命令执行这一阶段也是由主IO线程来完成的,所有命令执行的原子性仍然可以得到保证,也就是说分布式锁的原子性也仍然可以得到保证。
我们再来看下写回数据的流程。
在这个阶段,addReply函数是将客户端写回操作推迟执行的,而此时Redis命令已经完成执行了,所以,即使有多个IO线程在同时将客户端数据写回,也只是把结果返回给客户端,并不影响命令在Redis server中的执行结果。也就是说,即使使用了多IO线程写回,Redis同样可以保证命令执行的原子性。
下图展示了使用多IO线程机制后,命令处理过程各个阶段是由什么线程执行的,你可以再看下。
今天这节课我主要结合分布式锁的原子性保证需求,带你学习了Redis处理一条命令的整个过程。其中,你需要重点关注分布式锁实现的方法。
我们知道,加锁和解锁操作分别可以使用SET命令和Lua脚本与EVAL命令来完成。那么,分布式锁的原子性保证,就主要依赖SET和EVAL命令在Redis server中执行时的原子性保证了。
紧接着,我还带你具体剖析了下Redis中命令处理的整个过程。我把这个过程分成了四个阶段,分别是命令读取、命令解析、命令执行和结果返回。所以,你还需要了解这四个阶段中所执行函数的主要流程。
这四个阶段在Redis 6.0版本前都是由主IO线程来执行完成的。虽然Redis使用了IO多路复用机制,但是该机制只是一次性获取多个就绪的socket描述符,对应了多个发送命令请求的客户端。而Redis在主IO线程中,还是逐一来处理每个客户端上的命令的,所以命令执行的原子性依然可以得到保证。
而当使用了Redis 6.0版本后,命令处理过程中的读取、解析和结果写回,就由多个IO线程来处理了。不过你也不用担心,多个IO线程只是完成解析第一个读到的命令,命令的实际执行还是由主IO线程处理。当多个IO线程在并发写回结果时,命令就已经执行完了,不存在多IO线程冲突的问题。所以,使用了多IO线程后,命令执行的原子性仍然可以得到保证。
好,最后,我也想再说下我对多IO线程的看法。从今天课程介绍的内容中,你可以看到,多IO线程实际并不会加快命令的执行,而是只会将读取解析命令并行化执行,以及写回结果并行化执行,并且读取解析命令还是针对收到的第一条命令。实际上,这一设计考虑还是由于网络IO需要加速处理。那么,如果命令执行本身成为Redis运行时瓶颈了,你其实可以考虑使用Redis切片集群来提升处理效率。
如果将命令处理过程中的命令执行也交给多IO线程执行,你觉得除了对原子性会有影响,还会有什么好处或是其他不好的影响吗?
欢迎在留言区分享你的答案和见解。如果觉得有收获,也欢迎你把今天的内容分享给更多的朋友。
评论