你好,我是蒋德钧。这节课,我们继续来解答第19到24讲的课后思考题。
注意,今天讲解的这些思考题,一方面会涉及Redis哨兵实例的代码细节,以及管道机制在Redis中的应用;另一方面,这些思考题也是考查常用的开发知识,比如状态机、子进程使用等进程考查。希望你通过这节课的内容,可以再回顾下Redis哨兵实例的代码,并进一步了解题目解答中涉及的开发知识和技术。
问题:RDB文件的创建是由一个子进程来完成的,而AOF重写也是由一个子进程完成的,这两个子进程可以各自单独运行。那么请你思考一下,为什么Redis源码中在有RDB子进程运行时,不会启动AOF重写子进程呢?
我设计这道题的目的,是希望你能了解和掌握RDB文件创建和AOF重写这两个操作本身,涉及到的资源消耗。我们在开发系统软件时,对于使用子进程或是线程来进行并发处理,有时会存在一个误区:只要使用了多子进程或是多线程就可以加速并行执行的任务。
但是,执行多子进程能够获得的收益还是要看这些子进程,对资源竞争的情况。就像这道题目提出的,虽然RDB创建和AOF重写可以会用两个子进程单独运行,但是从它们使用的资源角度来看,它们之间会存在竞争。
那么,一个最明显的资源竞争就是对磁盘的写竞争。创建RDB文件和重写AOF,都需要把数据写入磁盘,如果同时让这两个子进程写盘,就会给磁盘带来较大的压力。而除了磁盘资源竞争以外,RDB文件创建和AOF重写还需要读取Redis数据库中的所有键值对,如果这两个子进程同时执行,也会消耗CPU资源。
问题:这节课,我给你介绍了重写子进程和主进程间进行操作命令传输、ACK信息传递用的三个管道。那么,你在Redis源码中还能找到其他使用管道的地方吗?
这道题目,是希望你能更多地了解下管道在Redis中的应用。有不少同学都找到了多个使用管道的地方,我在这里总结下。
在RDB文件的创建函数rdbSaveBackground、AOF重写的函数rewriteAppendOnlyFileBackground,以及把RDB通过socket传给从节点的函数rdbSaveToSlavesSockets中,它们都会调用openChildInfoPipe函数,创建一个管道child_info_pipe,这个管道的描述符数组,保存在了全局变量server中。
当RDB创建结束或是AOF文件重写结束后,这两个函数会调用sendChildInfo函数,通过刚才创建的管道child_info_pipe,把子进程写时复制的实际数据量发送给父进程。
下面的代码展示了rdbSaveBackground、rewriteAppendOnlyFileBackground、rdbSaveToSlavesSockets这三个函数使用管道的主要代码,你可以看下。
int rdbSaveBackground(char *filename, rdbSaveInfo *rsi) {
…
openChildInfoPipe();
if ((childpid = fork()) == 0) {
…
server.child_info_data.cow_size = private_dirty; //记录实际的写时复制数据量
sendChildInfo(CHILD_INFO_TYPE_RDB); //将写时复制数据量发送给父进程
…} …}
int rdbSaveToSlavesSockets(rdbSaveInfo *rsi) {
…
openChildInfoPipe();
if ((childpid = fork()) == 0) {
…
server.child_info_data.cow_size = private_dirty; //记录实际的写时复制数据量
sendChildInfo(CHILD_INFO_TYPE_RDB); //将写时复制数据量发送给父进程
…} …}
int rewriteAppendOnlyFileBackground(void) {
…
openChildInfoPipe(); //创建管道
…
if ((childpid = fork()) == 0) {
…
if (rewriteAppendOnlyFile(tmpfile) == C_OK) {
…
server.child_info_data.cow_size = private_dirty; //记录实际写时复制的数据量
sendChildInfo(CHILD_INFO_TYPE_AOF); //将写时复制的数据量发送给父进程
…} …}
…}
此外,在刚才介绍的rdbSaveToSlavesSockets函数中,它还会创建一个管道。当子进程把数据传给从节点后,子进程会使用这个管道,向父进程发送成功接收到所有数据传输的从节点ID,你可以看看下面的代码。
int rdbSaveToSlavesSockets(rdbSaveInfo *rsi) {
…
if (pipe(pipefds) == -1) return C_ERR;
server.rdb_pipe_read_result_from_child = pipefds[0]; //创建管道读端
server.rdb_pipe_write_result_to_parent = pipefds[1]; //创建管道写端
…
if ((childpid = fork()) == 0) {
…
//数据传输完成后,通过管道向父进程传输从节点ID
if (*len == 0 || write(server.rdb_pipe_write_result_to_parent,msg,msglen) != msglen) {…}
…} …}
在module的初始化函数moduleInitModulesSystem中,它会创建一个管道module_blocked_pipe,这个管道会用来唤醒由于处理module命令而阻塞的客户端。
下面的代码展示了管道在Redis module中的使用,你可以看下。
void moduleInitModulesSystem(void) {
...
if (pipe(server.module_blocked_pipe) == -1) {...} //创建管道
...}
int RM_UnblockClient(RedisModuleBlockedClient *bc, void *privdata) {
...
if (write(server.module_blocked_pipe[1],"A",1) != 1) {...} //向管道中写入“A”字符,表示唤醒被module阻塞的客户端
...}
void moduleHandleBlockedClients(void) {
...
while (read(server.module_blocked_pipe[0],buf,1) == 1); //从管道中读取字符
...}
基于arm64架构的Linux内核有一个Bug,这个Bug可能会导致数据损坏。而Redis源码就针对这个Bug,打了一个补丁,这个补丁在main函数的执行过程中,会调用linuxMadvFreeForkBugCheck函数,这个函数会fork一个子进程来判断是否发现Bug,而子进程会使用管道来和父进程交互检查结果。你也可以具体看下修复这个Bug的补丁。
问题:这节课我们介绍的状态机是当实例为从库时会使用的。那么,当一个实例是主库时,为什么不需要使用一个状态机,来实现主库在主从复制时的流程流转呢?
在Redis实现主从复制时,从库涉及到的状态变迁有很多,包括了发起连接、主从握手、复制类型判断、请求数据等。因此,使用状态机开发从库的复制流程,可以很好地帮助我们实现状态流转。
但是,如果你再去看下主从复制的启动,你会发现,主从复制都是由从库执行slaveof或replicaof命令而开始。这也就是说,主从复制的发起方是从库,而对于主库来说,它只是被动式地响应从库的各种请求,并根据从库的请求执行相应的操作,比如生成RDB文件或是传输数据等。
而且,从另外一个角度来说,主库可能和多个从库进行主从复制,而不同从库的复制进度和状态很可能并不一样,如果主库要维护状态机的话,那么,它还需要为每个从库维护一个状态机,这个既会增加开发复杂度,也会增加运行时的开销。正是因为这些原因,所以主库并不需要使用状态机进行状态流转。
除此之外, @曾轼麟同学也提到了一个原因,主库本身是可能发生故障,并要进行故障切换的。如果主库在执行主从复制时,也维护状态机,那么一旦主库发生了故障,也还需要考虑状态机的冗余备份和故障切换,这会给故障切换的开发和执行带来复杂度和开销。而从库维护状态机本身就已经能完成主从复制,所以没有必要让主库再维护状态机了。
问题:哨兵实例本身是有配置文件sentinel.conf的,那么你能在哨兵实例的初始化过程中,找到解析这个配置文件的函数吗?
在前面的第8讲中,我重点给你介绍了Redis server的启动和初始化过程。因为哨兵实例本身也是一个Redis server,所以它启动后的初始化代码执行路径,和Redis server是类似的。
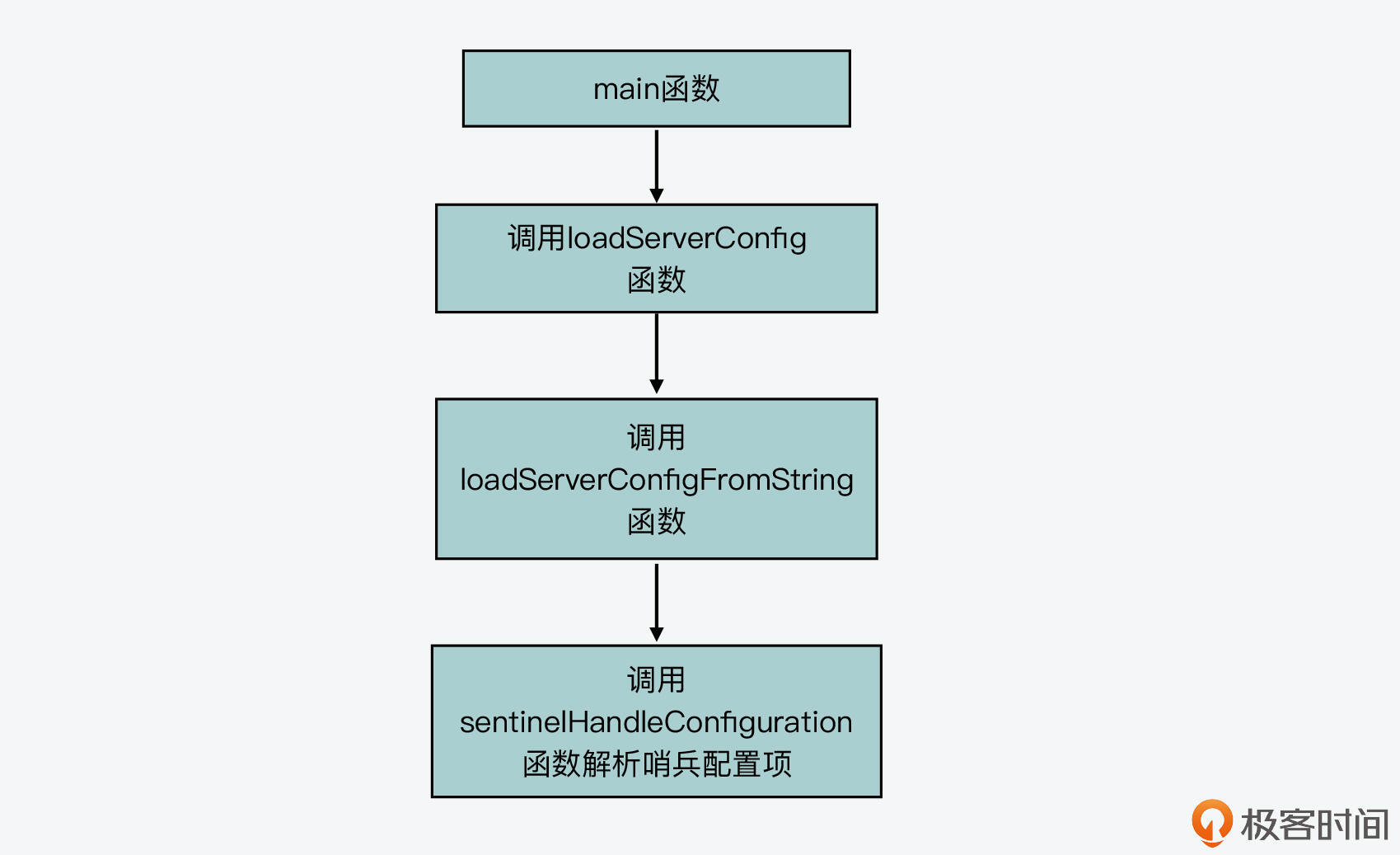
哨兵实例启动后,它的入口函数是serve.c文件中的main函数。然后,main函数会调用loadServerConfig函数加载配置文件。而loadServerConfig会进一步调用loadServerConfigFromString函数,解析配置文件中的具体配置项。
那么,当loadServerConfigFromString函数在解析配置项时,它会使用条件分支判断来匹配不同的配置项。当它匹配到配置项为“sentinel”时,它就会执行解析哨兵实例配置项的代码分支了,具体来说,它会调用sentinelHandleConfiguration函数来进行解析,如下所示:
void loadServerConfigFromString(char *config) {
else if (!strcasecmp(argv[0],"sentinel")) {
…
err = sentinelHandleConfiguration(argv+1,argc-1);
…}…}
sentinelHandleConfiguration函数是在sentinel.c文件中实现的,它和loadServerConfigFromString函数类似,也是匹配sentinel.conf中的不同配置项,进而执行不同的代码分支。你可以进一步阅读它的代码来进行了解。
我在这里也画了一张图,展示了哨兵实例解析配置项的函数调用关系,你可以看下。
问题:哨兵实例执行的周期性函数sentinelTimer,它在函数执行逻辑的最后,会修改server.hz配置项,如下所示:
void sentinelTimer(void) {
...
server.hz = CONFIG_DEFAULT_HZ + rand() % CONFIG_DEFAULT_HZ;
}
那么,你知道调整server.hz的目的是什么吗?
这道题目,像是@Kaito、@曾轼麟、@可怜大灰狼等不少同学,都给出了正确答案,这里我就来总结一下。
那么,要回答这道题目,首先你要知道server.hz表示的是定时任务函数serverCron的执行频率,而哨兵实例执行的周期性函数sentinelTimer,也是在serverCron中被调用执行的。所以,sentinelTimer函数的运行频率会按照server.hz来执行。
我在第23讲中给你介绍过,当哨兵实例判断了主节点客观下线后,它们就要开始选举Leader节点,以便进行故障切换。但是,Leader选举时,哨兵需要获得半数以上的赞成票,如果在一轮选举中没能选出Leader,此时,哨兵实例会再次进行选举。
但是,为了避免多个哨兵同时开始进行选举,又同时都没法获得超过半数的赞成票,而导致Leader选举失败,sentinelTimer函数在执行的最后一步,对server.hz做了微调:在默认值CONFIG_DEFAULT_HZ的基础上,增加一个随机值。
这样一来,每个哨兵的执行频率就不会完全同步了。一轮选举失败后,哨兵再次选举时,不同哨兵的再次执行频率不一样,这就把它们发起投票的时机错开了,从而降低了它们都无法获得超过半数赞成票的概率,也就保证了Leader选举能快速完成,可以执行实际的故障切换。
所以,sentinelTimer函数修改server.hz,可以避免故障切换过程中,因为Leader节点选举不出来而导致无法完成的情况,提升了Redis的可用性。
问题:哨兵在sentinelTimer函数中会调用sentinelHandleDictOfRedisInstances函数,对每个主节点都执行sentinelHandleRedisInstance函数,并且还会对主节点的所有从节点,也执行sentinelHandleRedisInstance函数。那么,哨兵会判断从节点的主观下线和客观下线吗?
这道题目是希望你能进一步阅读sentinelHandleRedisInstance函数的源码,对它的执行流程有个更加详细的了解。
@曾轼麟同学在留言区就给出了比较详细的分析,我在此基础上做了些完善,分享给你。
首先,在sentinelHandleDictOfRedisInstances函数中,它会执行一个循环流程,针对当前哨兵实例监听的每个主节点,都执行sentinelHandleRedisInstance函数。
在这个处理过程中,存在一个递归调用,也就是说,如果当前处理的节点就是主节点,那么sentinelHandleDictOfRedisInstances函数,会进一步针对这个主节点的从节点,再次调用sentinelHandleDictOfRedisInstances函数,从而对每个从节点执行sentinelHandleRedisInstance函数。
这部分的代码逻辑如下所示:
void sentinelHandleDictOfRedisInstances(dict *instances) {
…
di = dictGetIterator(instances);
while((de = dictNext(di)) != NULL) {
sentinelRedisInstance *ri = dictGetVal(de); //获取哨兵实例监听的每个主节点
sentinelHandleRedisInstance(ri); //调用sentinelHandleRedisInstance
if (ri->flags & SRI_MASTER) { //如果当前节点是主节点,那么调用sentinelHandleDictOfRedisInstances对它的所有从节点进行处理。
sentinelHandleDictOfRedisInstances(ri->slaves);
…}
…}…}
然后,在sentinelHandleRedisInstance函数执行时,它会调用sentinelCheckSubjectivelyDown函数,来判断当前处理的实例是否主观下线。这步操作没有任何额外的条件约束,也就是说,无论当前是主节点还是从节点,都会被判断是否主观下线的。这部分代码如下所示:
void sentinelHandleRedisInstance(sentinelRedisInstance *ri) {
…
sentinelCheckSubjectivelyDown(ri); //无论是主节点还是从节点,都会检查是否主观下线
…}
但是要注意,sentinelHandleRedisInstance函数在调用sentinelCheckObjectivelyDown函数,判断实例客观下线状态时,它会检查当前实例是否有主节点标记,如下所示:
void sentinelHandleRedisInstance(sentinelRedisInstance *ri) {
…
if (ri->flags & SRI_MASTER) { //只有当前是主节点,才检查是否客观下线
sentinelCheckObjectivelyDown(ri);
…}
…}
那么总结来说,对于主节点和从节点,它们的sentinelHandleRedisInstance函数调用路径就如下所示:
主节点:sentinelHandleRedisInstance -> sentinelCheckSubjectivelyDown -> sentinelCheckObjectivelyDown
从节点:sentinelHandleRedisInstance -> sentinelCheckSubjectivelyDown
所以,回到这道题目的答案上来说,哨兵会判断从节点的主观下线,但不会判断其是否客观下线。
此外,@曾轼麟同学还通过分析代码,看到了从节点被判断为主观下线后,是不能被选举为新主节点的。这个过程是在sentinelSelectSlave函数中执行的,这个函数会遍历当前的从节点,依次检查它们的标记,如果一个从节点有主观下线标记,那么这个从节点就会被直接跳过,不会被选为新主节点。
下面的代码展示了sentinelSelectSlave函数这部分的逻辑,你可以看下。
sentinelRedisInstance *sentinelSelectSlave(sentinelRedisInstance *master) {
…
di = dictGetIterator(master->slaves);
while((de = dictNext(di)) != NULL) { //遍历主节点的每一个从节点
sentinelRedisInstance *slave = dictGetVal(de);
…
if (slave->flags & (SRI_S_DOWN|SRI_O_DOWN)) continue; //如果从节点主观下线,那么直接跳过该节点,不能被选为新主节点
…} …}
好了,今天这节课就到这里了,我们来总结下。
今天这节课,我主要给你解答了第19讲到24讲的课后思考题。这些题目有些是涉及Redis源码的细节,比如哨兵实例的初始化操作、周期性任务对主从节点执行的操作等。对于这部分内容,我希望你能结合代码做进一步的阅读,并掌握好它。
而有些题目,则是和通用的开发知识和技巧相关。比如,管道在子进程和父进程间提供的通信机制、状态机在复杂流程开发中的使用、分布式共识开发中的投票频率调整等。关于这部分内容,我希望你能结合它们在Redis代码实现中的应用,掌握它们的使用方法,并应用到你自己的系统开发中。
评论